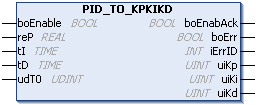
PID_TO_KPKIKD (FB)
Der Funktionsbaustein 'PID_TO_KPKIKD' berechnet aus dem Proportionalanteil, die Nachstellzeit, die Vorhaltezeit und die Abtastzeit der Reglerparameter Kp, Ki und Kd, die der Funktionsbaustein als Eingangsgrößen benötigt.
Der Funktionsbaustein wird in der asynchronen Programmebene PLC_PRG aufgerufen.
Es gilt:
|
|
bildet im Zusammenwirken mit 'PID_TO_KPKIKD' einen PID Regler, dessen Standard Regelparameter von der Abtastzeit unabhängig sind. Die zeitaufwendige Berechnung von Kp, Ki, Kd mit 'PID_TO_KPKIKD' kann in der asynchronen Programmebene PLC_PRG erfolgen, während der laufzeitoptimierte Regelalgorithmus in der synchronen Programmebene FPLC_PRG bearbeitet wird. |

Anwender Interface
|
Name |
Typ |
Beschreibung |
||||
|---|---|---|---|---|---|---|
|
boEnable |
BOOL |
Freigabesignal: Mit einer positiven Flanke startet die Initialisierung des Bausteins. Solange 'boEnable' und der Ausgang 'boEnabAck' = TRUE ist, ist der Baustein freigegeben und wird von der PLC bearbeitet. Im Zustand 'boEnable' = FALSE wird dem Baustein die Freigabe entzogen und er wird nicht mehr abgearbeitet. |
||||
|
reP |
REAL |
Proportionalanteil Interne Normierung 1/256: |
||||
|
tI |
TIME |
Integrationszeitkonstante: Nachstellzeit Tn
|
||||
|
tD |
TIME |
Differentiationszeitkonstante: Vorhaltezeit Tv
|
||||
|
udT0 |
UDINT |
Abtastzeit, mit welcher der PID-Algorithmus abgearbeitet wird
|
|
Name |
Typ |
Beschreibung |
|||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
boEnabAck |
BOOL |
Quittierung: Funktionsbaustein ist initialisiert und freigegeben |
|||||||||||||||||||||||||||||
|
boErr |
BOOL |
Der Funktionsbaustein befindet sich im Zustand Fehler
|
|||||||||||||||||||||||||||||
|
iErrID |
INT |
Fehler Identnummer: Diagnosenummer wird ausgegeben
|
|||||||||||||||||||||||||||||
|
uiKp |
UINT |
Proportionalverstärkung (P) des PID-Reglers
|
|||||||||||||||||||||||||||||
|
uiKi |
UINT |
Integrationsverstärkung (I) des PID-Reglers.
|
|||||||||||||||||||||||||||||
|
uiKd |
UINT |
Differentialverstärkung (D) des PID-Reglers
|
|||||||||||||||||||||||||||||
