Sicherer Betriebshalt (Safe operating stop, SOS)
Eigenschaften
- Sicherheitsfunktion nach DIN EN 61800-5-2:2008-04
- Sichere Stillstandsüberwachung mit Drifterkennung
(2-kanalige Überwachung des Drehzahl- und Lageistwerts)
Beschreibung
Die Sicherheitsfunktion wird durch das entsprechende Bit im Steuerwort gestartet.
Die Rückmeldung der Quittierungssignale erfolgt über das Statuswort.
Die gestartete Sicherheitsfunktion SOS überwacht den Drehzahlistwert und prüft, ob das Sichere Drehzahl-Stillstandsfenster und das Sichere Positions-Stillstandsfenster eingehalten werden.
|
|
|
|
|
Lebensgefahr durch unerwartete Bewegungen! Die Normalfunktion 'Sichere Geberstillstandsüberwachung (Safe encoder monitoring, SEM)' ist immer aktiv und schaltet den Antrieb automatisch vom Zustand 'Sicherer Betriebshalt (Safe operating stop, SOS)' in den Zustand 'Sicherer Stopp 1 (Safe stop 1, SS1)' und darauf folgend in 'Sicher abgeschaltetes Moment (Safe torque off, STO)', wenn der überwachte Geber länger still steht, als in der Normalfunktion 'Sichere Geberstillstandsüberwachung' parametriert ist. Im Zustand ''Sicher abgeschaltetes Moment (Safe torque off, STO)', bei Netzausfall oder defektem Antriebsregler ist der Antrieb drehmomentfrei. Gegenmaßnahmen:
|


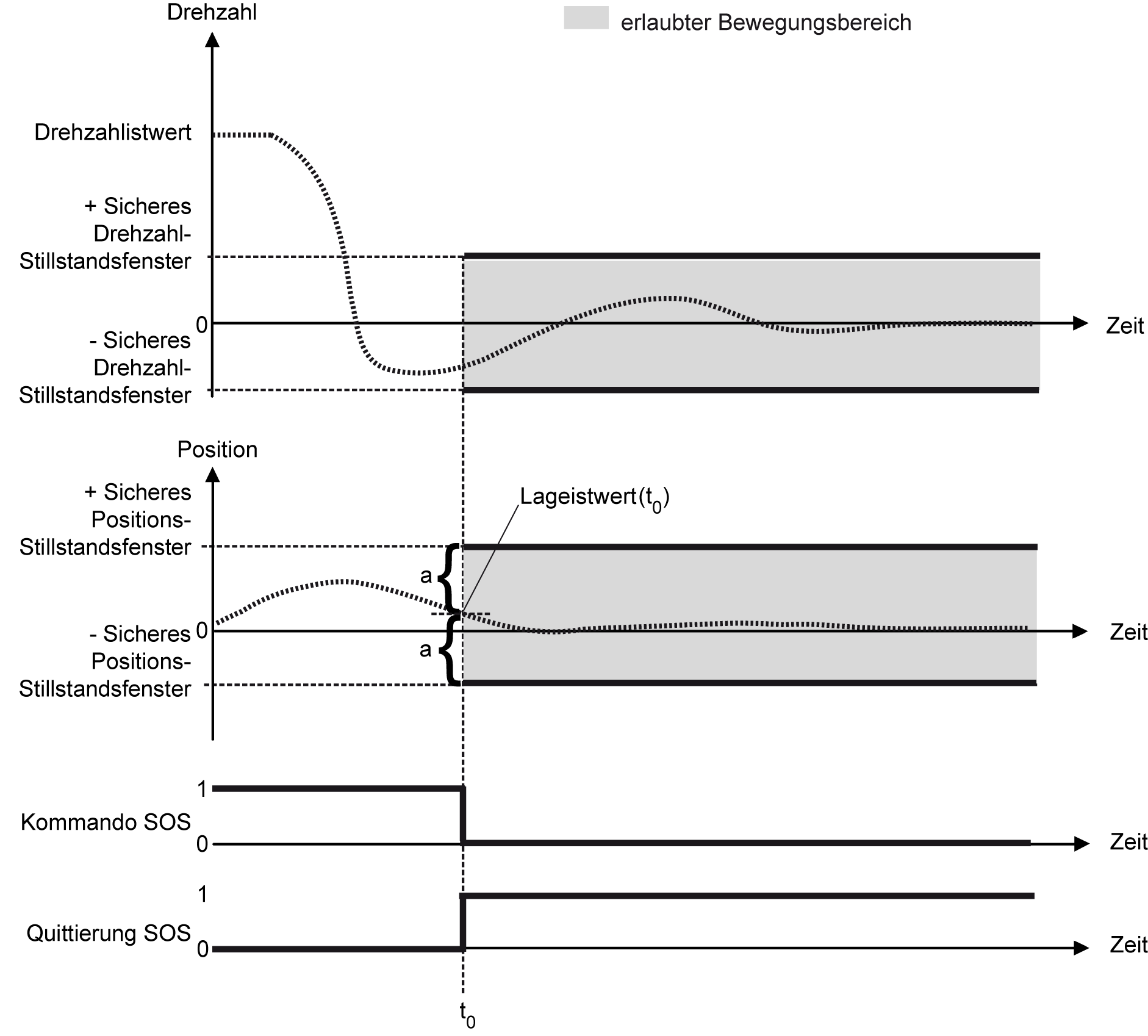
Beispiel 1: Antriebsbewegung im erlaubten Bewegungsbereich
|
Zeit t |
Erklärung |
|---|---|
|
t = t0 |
Die Sicherheitsfunktion wird gestartet. Das Sichere Positions-Stillstandsfenster wird zum Zeitpunkt der Kommandierung symmetrisch um den aktuellen Lageistwert des Antriebs gelegt. |
Verhalten im Fehlerfall
Sobald die Sicherheitsfunktion feststellt, dass Grenzen der überwachten Größen verletzt werden, wird der Antrieb in den sicheren Zustand 'Sicher abgeschaltetes Moment (Safe torque off, STO)' überführt (Beispiel 2) und (Beispiel 3).
|
|
|
|
|
Lebensgefahr durch unerwartete Bewegungen! Im Zustand 'Sicher abgeschaltetes Moment (Safe torque off, STO)', bei Netzausfall oder defektem Antriebsregler ist der Antrieb drehmomentfrei. Gegenmaßnahmen:
|
Beispiel 2: Antriebsbewegung verletzt das Sichere Drehzahl-Stillstandsfenster

|
Zeit t |
Erklärung |
|---|---|
|
t = t0 |
Die Sicherheitsfunktion wird gestartet. Das Sichere Positions-Stillstandsfenster wird zum Zeitpunkt der Kommandierung symmetrisch um den aktuellen Lageistwert des Antriebs gelegt. |
|
t0 < t < t1 |
Die Sicherheitsfunktion überwacht die Einhaltung des Sicheren Drehzahl-Stillstandsfensters und des Sicheren Positions-Stillstandsfensters und überprüft, ob der Drehzahlistwert im erlaubten Bewegungsbereich liegt. |
|
t = t1 |
Die Sicherheitsfunktion stellt fest, dass das Sichere Drehzahl-Stillstandsfenster verlassen wurde, schaltet den Antrieb in den Zustand STO und setzt das Error-Bit im Statuswort. Das Quittierungsbit SOS wird zurückgesetzt. |
|
t ≥ t1 |
Im Zustand STO werden Antriebsbewegungen nicht mehr überwacht, da keine weitere Fehlerreaktion möglich ist. |
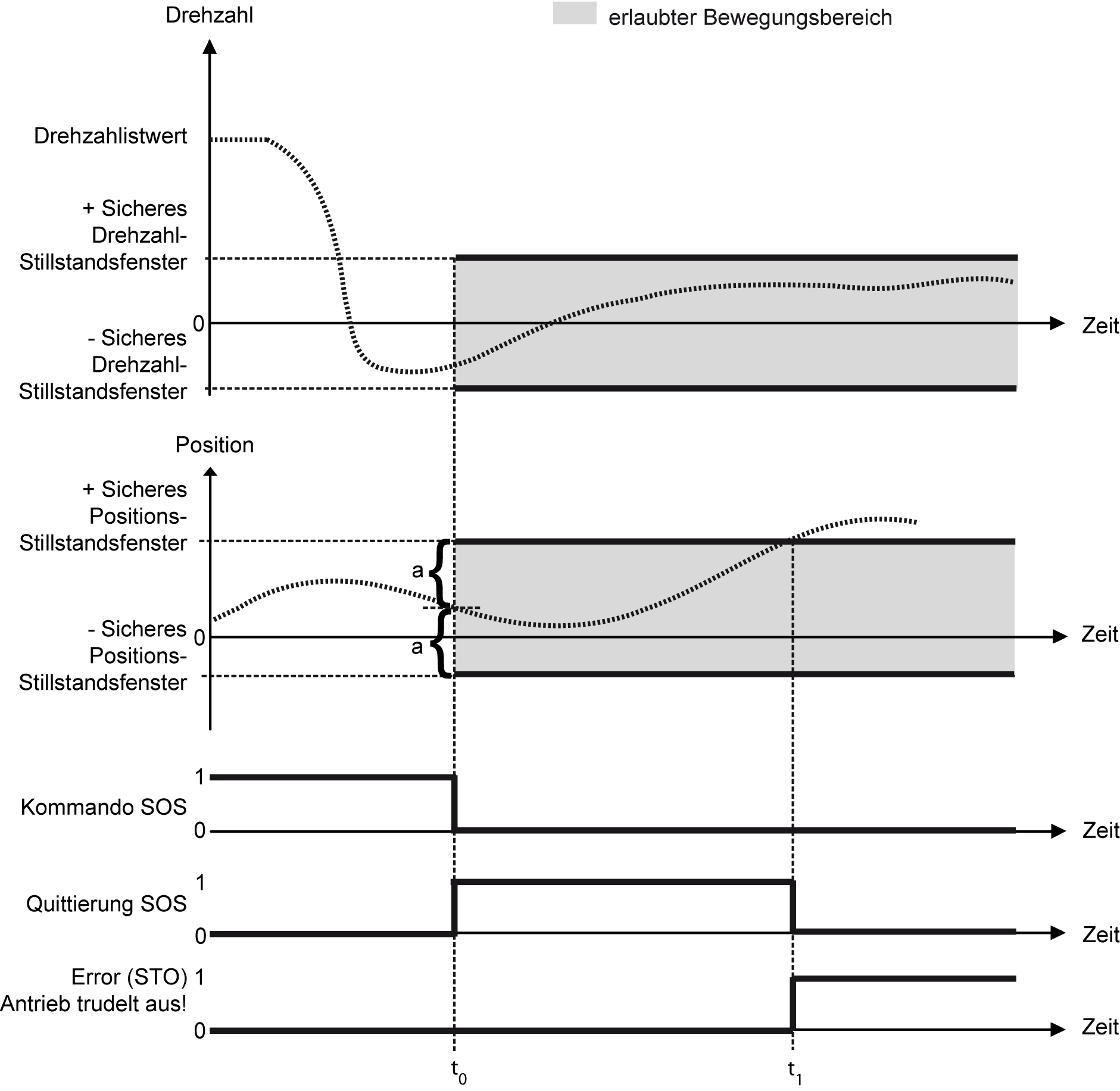
Beispiel 3: Antriebsbewegung verletzt das Sichere Positions-Stillstandsfenster
|
Zeit t |
Erklärung |
|---|---|
|
t = t0 |
Die Sicherheitsfunktion wird gestartet. Das Sichere Positions-Stillstandsfenster wird zum Zeitpunkt der Kommandierung symmetrisch um den aktuellen Lageistwert des Antriebs gelegt. |
|
t0 < t < t1 |
Die Sicherheitsfunktion überwacht die Einhaltung des Sicheren Drehzahl-Stillstandsfensters und des Sicheren Positions-Stillstandsfensters und überprüft, ob der Drehzahlistwert im erlaubten Bewegungsbereich liegt. |
|
t = t1 |
Die Sicherheitsfunktion stellt fest, dass das Sichere Positions-Stillstandsfenster verlassen wurde, schaltet den Antrieb in den Zustand STO und setzt das Error-Bit im Statuswort. Das Quittierungsbit SOS wird zurückgesetzt. |
|
t ≥ t1 |
Im Zustand STO werden Antriebsbewegungen nicht mehr überwacht, da keine weitere Fehlerreaktion möglich ist. |
Fehlerfall mit "Fehler Löschen" quittieren
Sobald eine aktive Sicherheitsfunktion feststellt, dass überwachte Grenzen verletzt wurden, löst sie die dafür vorgesehene Stoppfunktion aus. Das Errorbit (FSoE Status Bit 7) wird gesetzt und die Quittierung des Sicheren Zustands zurückgenommen.
Mit dem Signal 'Fehler Löschen' (FSoE Steuerbit 7 oder dem Kommando 'Fehler Löschen' im Antriebsregler) kann der Fehlerzustand quittiert (gelöscht) werden. Wenn während und nach dem 'Fehler Löschen' das Startsignal einer zuvor beauftragten Sicherheitsfunktion noch anliegt und auch sonst keine Änderungen an den Einstellungen der Sicherheitsfunktion gemacht wurden, startet die Sicherheitsfunktion erneut und auch Übergangszeiten (falls vorhanden) wirken wieder erneut.
Parameter
Sichere Parameter
|
Parameter |
Name |
Kürzel |
Einheit |
Min |
Max |
|
'Sicheres Drehzahl-Stillstandsfenster SOS' |
N(zero,SOS) |
U/min |
0 |
60000 |
|
'Sicheres Positions-Stillstandsfenster SOS' |
S(zero,SOS) |
Inkr. |
-2147483647 |
2147483647 |
