Sicherer Geschwindigkeitsbereich (Safe speed range, SSR)
Eigenschaften
- Sicherheitsfunktion nach DIN EN 61800-5-2:2008-04
- Frei parametrierbarer Sicherer Drehzahlbereich (2-kanalige Drehzahlistwertüberwachung)
- 4 individuell konfigurierbare Sicherheitsfunktionen SSR1, SSR2, SSR3, SSR4
- Parametrierbare Stoppfunktion im Fehlerfall
Beschreibung
Die Sicherheitsfunktion wird durch das entsprechende Bit im Steuerwort gestartet.
Die Rückmeldung der Quittierungssignale erfolgt über das Statuswort.
Die gestartete Sicherheitsfunktion SSR überwacht die Drehzahländerung des Antriebs und anschließend den Betrieb innerhalb eines parametrierten Sicheren Drehzahlbereichs. Die Drehzahländerung muss von der Anwendersteuerung eingeleitet werden.
Beispiel 1: Antriebsbewegung im erlaubten Bewegungsbereich

|
Zeit t |
Erklärung |
|---|---|
|
t = t0 |
Die Sicherheitsfunktion wird gestartet. |
|
t0 < t < t1 |
In der Übergangszeit muss der Drehzahlistwert des Antriebs an die parametrierten Grenzen der gestarteten Sicherheitsfunktion angepasst werden. Die parametrierten Grenzen werden noch nicht überwacht. |
|
t1 ≤ t < t2 |
Die Sicherheitsfunktion überwacht die parametrierte Rampe und überprüft, ob der Drehzahlistwert im erlaubten Bewegungsbereich liegt. |
|
t ≥ t2 |
Die Sicherheitsfunktion schaltet den Antrieb in den Zustand SSR und setzt das Quittierungsbit SSR. Im Zustand SSR überwacht die Sicherheitsfunktion, ob der Drehzahlistwert im parametrierten Sicheren Drehzahlbereich liegt. |
|
t = t3 |
Quittierung SSR bei Maximaldrehzahl |
Verhalten im Fehlerfall
Sobald die Sicherheitsfunktion feststellt, dass Grenzen der überwachten Größen verletzt werden, führt der Antrieb eine zuvor per Parameter festgelegte Sichere Stoppfunktion aus ('Sicher abgeschaltetes Moment (Safe torque off, STO)', 'Sicherer Stopp 1 (Safe stop 1, SS1)' oder 'Sicherer Stopp 2 (Safe stop 2, SS2)') (Beispiel 2) und (Beispiel 2a).
Die 4 SSR Sicherheitsfunktionen überwachen den Antrieb unabhängig voneinander. Sobald der Antrieb den parametrierten Sicheren Drehzahlbereich in einer der vier Sicherheitsfunktionen SSR1 - SSR4 verlässt, wird die Stoppfunktion aktiv, die für diese SSR parametriert wurde (Beispiel 3).
|
|
|
|
|
Lebensgefahr durch unerwartete Bewegungen! Im Zustand 'Sicher abgeschaltetes Moment (Safe torque off, STO)', bei Netzausfall oder defektem Antriebsregler ist der Antrieb drehmomentfrei. Gegenmaßnahmen:
|


|
|
|
|
|
Gefahr durch unerwartete Stoppfunktion! Werden für die Sicherheitsfunktionen verschiedene Fehlerreaktionen projektiert, so kann im Fehlerfall ein unerwartetes Endstadium erreicht werden. Beispiel: Gegenmaßnahmen:
|
|
|
Die Reaktionszeit des Antriebs im Fehlerfall verlängert sich um die Reaktionszeit der parametrierten Stoppfunktion! |

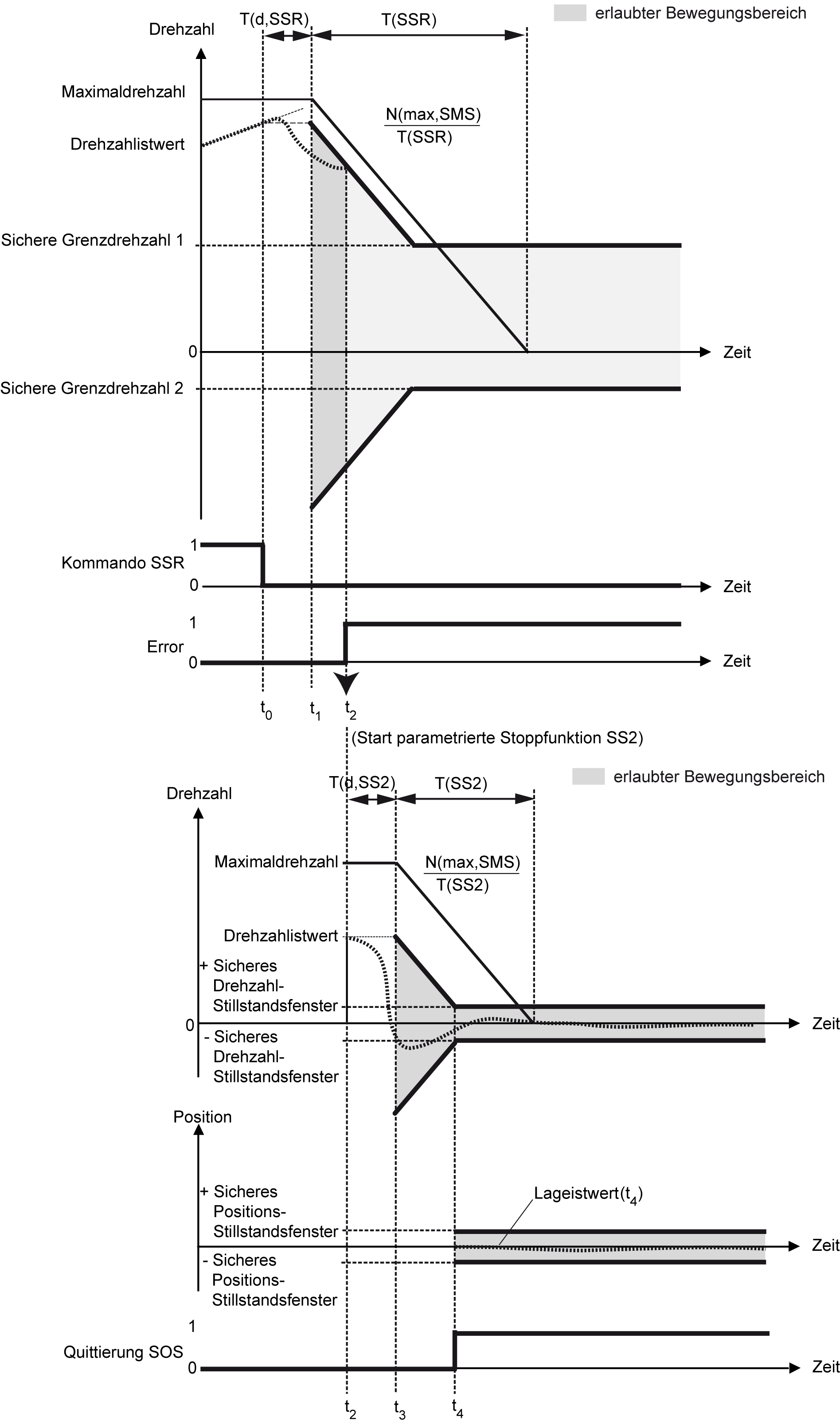
Beispiel 2: Antriebsbewegung verletzt den erlaubten Bewegungsbereichs

|
Zeit t |
Erklärung |
|---|---|
|
t = t0 |
Die Sicherheitsfunktion wird gestartet. |
|
t0 < t < t1 |
In der Übergangszeit muss der Drehzahlistwert des Antriebs an die parametrierten Grenzen der gestarteten Sicherheitsfunktion angepasst werden. Die parametrierten Grenzen werden noch nicht überwacht. |
|
t1 ≤ t < t2 |
Die Sicherheitsfunktion überwacht die parametrierte Rampe und überprüft, ob der Drehzahlistwert im erlaubten Bewegungsbereich liegt. |
|
t = t2 |
Die Sicherheitsfunktion stellt einen Fehler fest, startet die parametrierte Stoppfunktion und setzt das Error-Bit.
|
Beispiel 2a: Antriebsbewegung verletzt den erlaubten Bewegungsbereich (SS2 als parametrierte Stoppfunktion)
|
Zeit t |
Erklärung |
|---|---|
|
t = t0 |
Die Sicherheitsfunktion wird gestartet. |
|
t0 < t < t1 |
In der Übergangszeit muss der Drehzahlistwert des Antriebs an die parametrierten Grenzen der gestarteten Sicherheitsfunktion angepasst werden. Die parametrierten Grenzen werden noch nicht überwacht. |
|
t1 ≤ t < t2 |
Die Sicherheitsfunktion überwacht die parametrierte Rampe und überprüft, ob der Drehzahlistwert im erlaubten Bewegungsbereich liegt. |
|
t = t2 |
Die Sicherheitsfunktion stellt einen Fehler fest, startet die parametrierte Stoppfunktion SS2 und setzt das Error-Bit. |
|
t2 < t < t3 |
In der Übergangszeit muss der Drehzahlistwert des Antriebs an die parametrierten Grenzen der gestarteten Sicherheitsfunktion angepasst werden. Die parametrierten Grenzen werden noch nicht überwacht. |
|
t3 ≤ t < t4 |
Die Sicherheitsfunktion überwacht die parametrierte Rampe und überprüft, ob der Drehzahlistwert im erlaubten Bewegungsbereich liegt. |
|
t ≥ t4 |
Die Sicherheitsfunktion schaltet den Antrieb in den Zustand SOS und setzt das Quittierungsbit SOS. Im Zustand SOS überwacht die Sicherheitsfunktion, ob der Drehzahlistwert im Sicheren Drehzahl-Stillstandsfenster und der Lageistwert im Sicheren Positions-Stillstandsfenster liegen. |
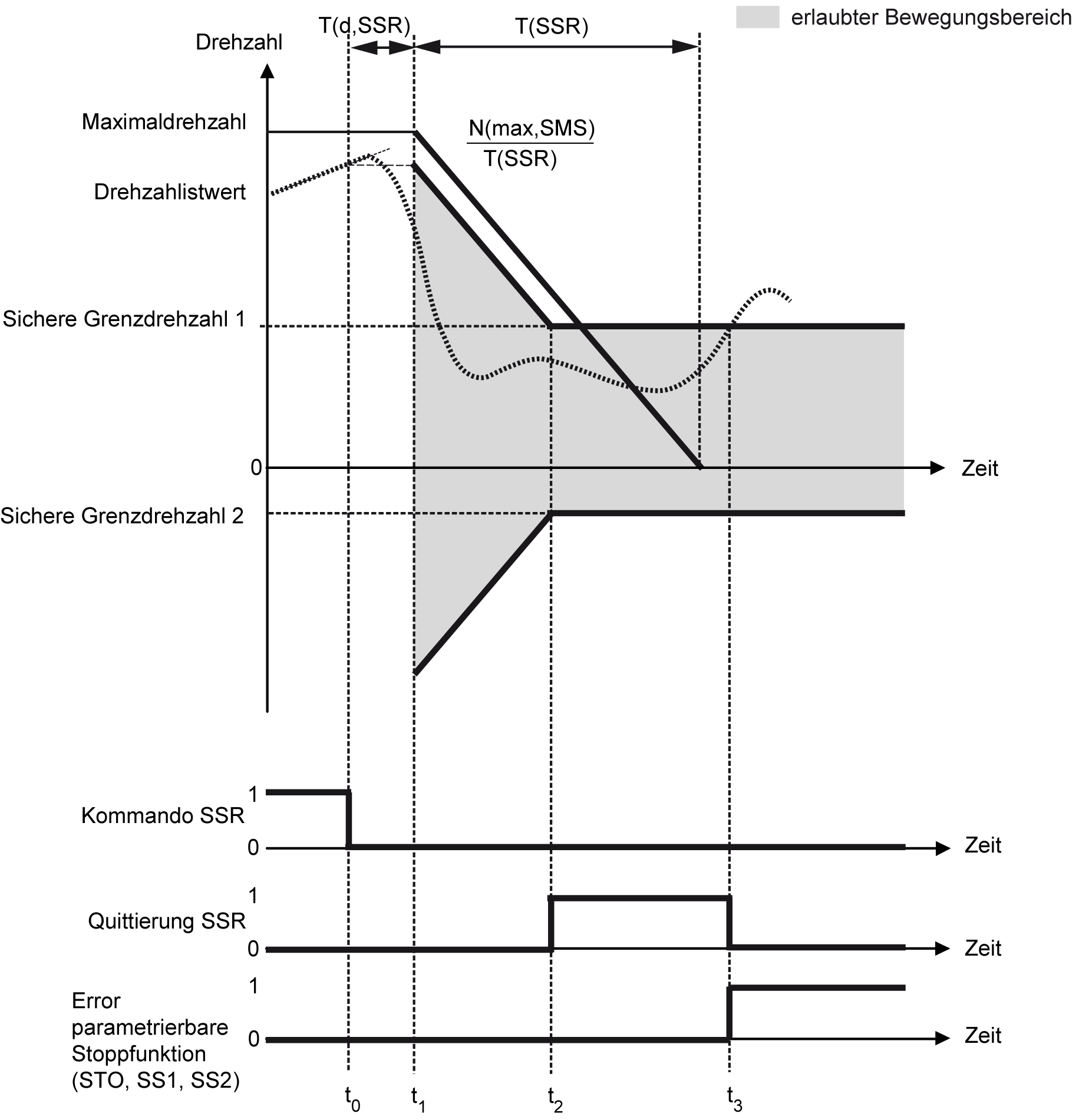
Beispiel 3: Antriebsbewegung verletzt den Sicheren Drehzahlbereich im Zustand SSR
|
Zeit t |
Erklärung |
|---|---|
|
t = t0 |
Die Sicherheitsfunktion wird gestartet. |
|
t0 < t < t1 |
In der Übergangszeit muss der Drehzahlistwert des Antriebs an die parametrierten Grenzen der gestarteten Sicherheitsfunktion angepasst werden. Die parametrierten Grenzen werden noch nicht überwacht. |
|
t1 ≤ t < t2 |
Die Sicherheitsfunktion überwacht die parametrierte Rampe und überprüft, ob der Drehzahlistwert im erlaubten Bewegungsbereich liegt. |
|
t = t2 |
Die Sicherheitsfunktion schaltet den Antrieb in den Zustand SSR und setzt das Quittierungsbit SSR. |
|
t2 ≤ t < t3 |
Im Zustand SSR überwacht die Sicherheitsfunktion, ob der Drehzahlistwert im Sicheren Drehzahlbereich liegt. |
|
t = t3 |
Die Sicherheitsfunktion stellt einen Fehler fest, schaltet den Antrieb in die parametrierte Stoppfunktion und setzt das Error-Bit. Das Quittierungsbit SSR wird zurückgesetzt. |
|
t > t3 |
Das Verhalten ist abhängig von der parametrierten Stoppfunktion |
Fehlerfall mit "Fehler Löschen" quittieren
Sobald eine aktive Sicherheitsfunktion feststellt, dass überwachte Grenzen verletzt wurden, löst sie die dafür vorgesehene Stoppfunktion aus. Das Errorbit (FSoE Status Bit 7) wird gesetzt und die Quittierung des Sicheren Zustands zurückgenommen.
Mit dem Signal 'Fehler Löschen' (FSoE Steuerbit 7 oder dem Kommando 'Fehler Löschen' im Antriebsregler) kann der Fehlerzustand quittiert (gelöscht) werden. Wenn während und nach dem 'Fehler Löschen' das Startsignal einer zuvor beauftragten Sicherheitsfunktion noch anliegt und auch sonst keine Änderungen an den Einstellungen der Sicherheitsfunktion gemacht wurden, startet die Sicherheitsfunktion erneut und auch Übergangszeiten (falls vorhanden) wirken wieder erneut.
Parameter
Sichere Parameter
|
Parameter |
Name |
Kürzel |
Einheit |
Min |
Max |
|
'Übergangszeit SSR1' |
T(d,SSR1) |
ms |
0 |
65535 |
|
'Zeit Bremsrampe SSR1' |
T(SSR1) |
ms |
0 |
65535 |
|
'Sichere Grenzdrehzahl 1 SSR1' |
N(ul,SSR1) |
U/min |
-60000 |
60000 |
|
'Sichere Grenzdrehzahl 2 SSR1' |
N(ll,SSR1) |
U/min |
-60000 |
60000 |
|
'Fehlerreaktion SSR1' |
SSR1_ERR |
- |
0 |
2 |
|
'Übergangszeit SSR2' |
T(d,SSR2) |
ms |
0 |
65535 |
|
'Zeit Bremsrampe SSR2' |
T(SSR2) |
ms |
0 |
65535 |
|
'Sichere Grenzdrehzahl 1 SSR2' |
N(ul,SSR2) |
U/min |
-60000 |
60000 |
|
'Sichere Grenzdrehzahl 2 SSR2' |
N(ll,SSR2) |
U/min |
-60000 |
60000 |
|
'Fehlerreaktion SSR2' |
SSR2_ERR |
- |
0 |
2 |
|
'Übergangszeit SSR3' |
T(d,SSR3) |
ms |
0 |
65535 |
|
'Zeit Bremsrampe SSR3' |
T(SSR3) |
ms |
0 |
65535 |
|
'Sichere Grenzdrehzahl 1 SSR3' |
N(ul,SSR3) |
U/min |
-60000 |
60000 |
|
'Sichere Grenzdrehzahl 2 SSR3' |
N(ll,SSR3) |
U/min |
-60000 |
60000 |
|
'Fehlerreaktion SSR3' |
SSR3_ERR |
- |
0 |
2 |
|
'Übergangszeit SSR4' |
T(d,SSR4) |
ms |
0 |
65535 |
|
'Zeit Bremsrampe SSR4' |
T(SSR4) |
ms |
0 |
65535 |
|
'Sichere Grenzdrehzahl 1 SSR4' |
N(ul,SSR4) |
U/min |
-60000 |
60000 |
|
'Sichere Grenzdrehzahl 2 SSR4' |
N(ll,SSR4) |
U/min |
-60000 |
60000 |
|
'Fehlerreaktion SSR4' |
SSR4_ERR |
- |
0 |
2 |
|
'Sichere Maximaldrehzahl SMS' |
N(max,SMS) |
U/min |
0 |
60000 |
Relevante nicht sichere Parameter
|
Parameter |
Name |
Kürzel |
Einheit |
Min |
Max |
|
ID113 |
'Maximaldrehzahl' |
Nmax |
U/min |
1 |
100000 |
|
ID32780 |
'Hochlaufzeit' |
TH |
ms |
1 |
1200000 |
|
ID32781 |
'Tieflaufzeit' |
TL |
ms |
1 |
1200000 |
|
ID32782 |
'Tieflaufzeit RF inaktiv' |
- |
ms |
1 |
1200000 |
