Ablauf der 'Einzelnen Positionierung' und der 'Positionierung mit Override'
Die Betriebsart 'profile position mode' unterstützt 2 Varianten der Positionierung:
Einzelne Positionierung
Nachdem die Zielposition (Sollwert 1) erreicht ist, wird diese quittiert und der Antrieb regelt solange auf die aktuelle Position, bis eine neue Zielposition (Sollwert 2) vorgegeben wird.
Positionierung mit Override
Eine neue Zielposition (Sollwert 2) werden vorgegeben , während die Positionierung mit Sollwert 1 noch nicht abgeschlossen ist. Nachdem die Zielposition (Sollwert 1) erreicht ist, positioniert der Antrieb sofort zur nächsten vorgegebenen Zielposition. Dabei bleibt der Antrieb an der Zielposition 1 nicht stehen, sondern geht fließend in die nächste Positionierung über.
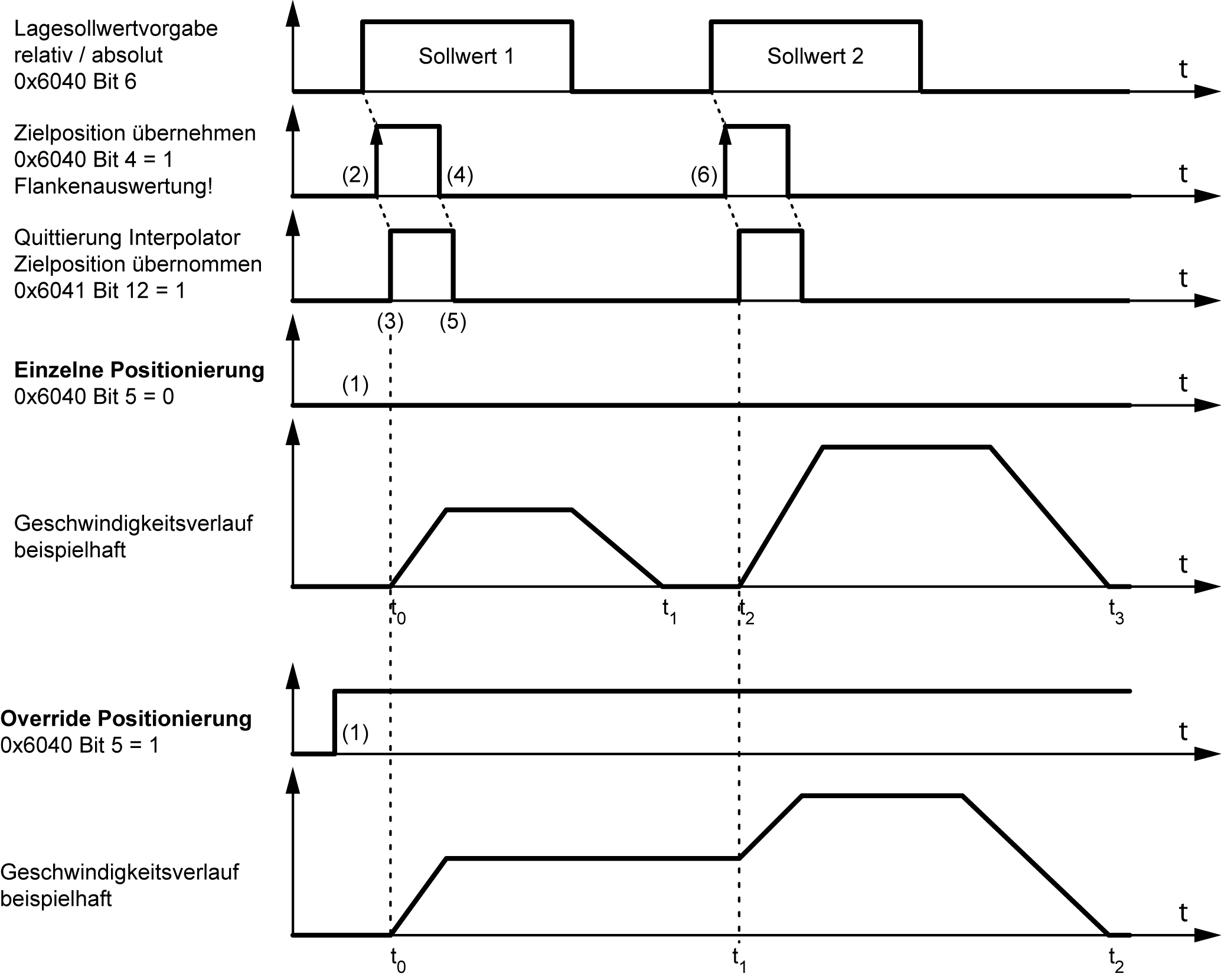
Ablauf:
- Legen Sie die Variante der Positionierung fest (Objekt 0x6040): Einzelne Positionierung (Bit 5 = 0) oder Override Positionierung (Bit 5 = 1)
- Geben Sie die Zielposition vor (Objekt 0x607A 'Target position')
- Legen Sie fest, ob die Zielposition absolut oder relativ behandelt werden soll (0x6040 Bit 6)
- Setzen Sie das Steuersignal 'Zielposition übernehmen' (2)
- Der Interpolator quittiert, wenn die Zielposition übernommen ist (3). Der Positioniervorgang startet (t0)
- Das Steuersignal 'Zielposition übernehmen' kann zurückgesetzt werden (4) (Objekt 0x6040 Bit 4 = 0)
- Der Antrieb setzt die Quittierung 'Interpolator hat Zielposition übernommen' zurück (5) (Objekt 0x6040 Bit 12 = 0)
- Variante 'Einzelne Positionierung': Zum Zeitpunkt t1 ist die Zielposition erreicht und die Quittierung 'Zielposition erreicht (Objekt 0x6041 Bit 10 = 1) wird gesetzt. Ab jetzt kann eine neue Zielposition vorgegeben werden (Positionierfahrt zwischen t2 und t3)
- Variante 'Override Positionierung': Eine neue Zielposition (Sollwert 2) (0x607A) und Führungsdrehzahl (0x6081) werden vorgegeben, während die bisherige Positionierung ( Sollwert 1) noch nicht abgeschlossen ist (t1). Die neue Zielposition wird mit der Flanke (6) vom Interpolator übernommen und das Bewegungsprofil angepasst. Der Übergang auf das neue Positionierprofil verläuft fließend, ohne das der Antrieb an der Zielposition von Sollwert 1 zum Stehen kommt. Zum Zeitpunkt t2 ist die Zielposition (nach Sollwert 2) erreicht und die Quittierung 'Zielposition erreicht (Objekt 0x6041 Bit 10 = 1) wird gesetzt.
