0x233E 'Offset commutation'
|
Unterstützte Hardware: |
|
||
|---|---|---|---|
Beschreibung
|
Index |
0x233E |
|
Name |
'Offset commutation' |
|
Objekttyp |
VAR |
|
Datentyp |
UNSIGNED16 |
|
|
|
|---|---|
|
|
Verletzungsgefahr durch unkontrollierte Bewegungen der Motorwelle Wird der Offset falsch eingegeben, ist der Motor nicht regelbar und kann unkontrollierte Bewegungen ausführen, sobald die Reglerfreigabe gesetzt wird! Mit der Funktion 'Urladen' wird der Offset auf den Standardwert 0 zurückgesetzt. Ein zuvor ermittelter Kommutierungsoffset geht verloren. Es findet keine remanente Speicherung im Geber statt. Gegenmaßnahmen:
|


Die
Der 'Offset commutation' wird zum eigentlichen Kommutierungswinkel des Gebers addiert.
Ist das Motornegationsbit in
Als 'Offset commutation' können nur positive Werte im Bereich 0 – 65535 [Inkremente] vorgegeben werden.
Der Wert 65535 entspricht einer Verschiebung um eine mechanische Umdrehung des Motors (360°).
Anwendungsbereiche:
Fremdmotoren bei denen die Bestimmung des Kommutierungswinkels von der von AMK durchgeführten Methode abweicht.
Vorteil:
Mit 'Offset commutation' kann der Kommutierungswinkel des Fremdmotors an den AMK Wechselrichter angepasst werden, ohne den herstellerspezifischen Wert im Geber zu ändern.
Der 'Offset commutation' wirkt bei folgenden Gebertypen EnDat und Hiperface (AMK Bezeichnungen E, F, S, T, P, Q, U, V).
Ein weiterer Anwendungsbereich ist das 'Feintuning' des Kommutierungswinkels. Eine bestehende Abweichung zum optimalen Kommutierungswinkel kann durch kleine Offsetwerte kompensiert werden.
Beispiel: Berechnung des Kommutierungswinkels aus dem Kommutierungsoffset und der Geberposition
|
Beispiel |
|
Wert |
|---|---|---|
|
1 |
|
0 0 [Inkremente] 451 [Inkremente] |
|
2 |
|
0 13000 [Inkremente] 13451 [Inkremente] |
|
3 |
|
1 0 [Inkremente] 65085 [Inkremente] |
|
4 |
|
1 13000 [Inkremente] 52085 [Inkremente] |
Beispiel: Fehler im Kommutierungswinkel kompensieren
Motorumdrehung mechanisch (360°)
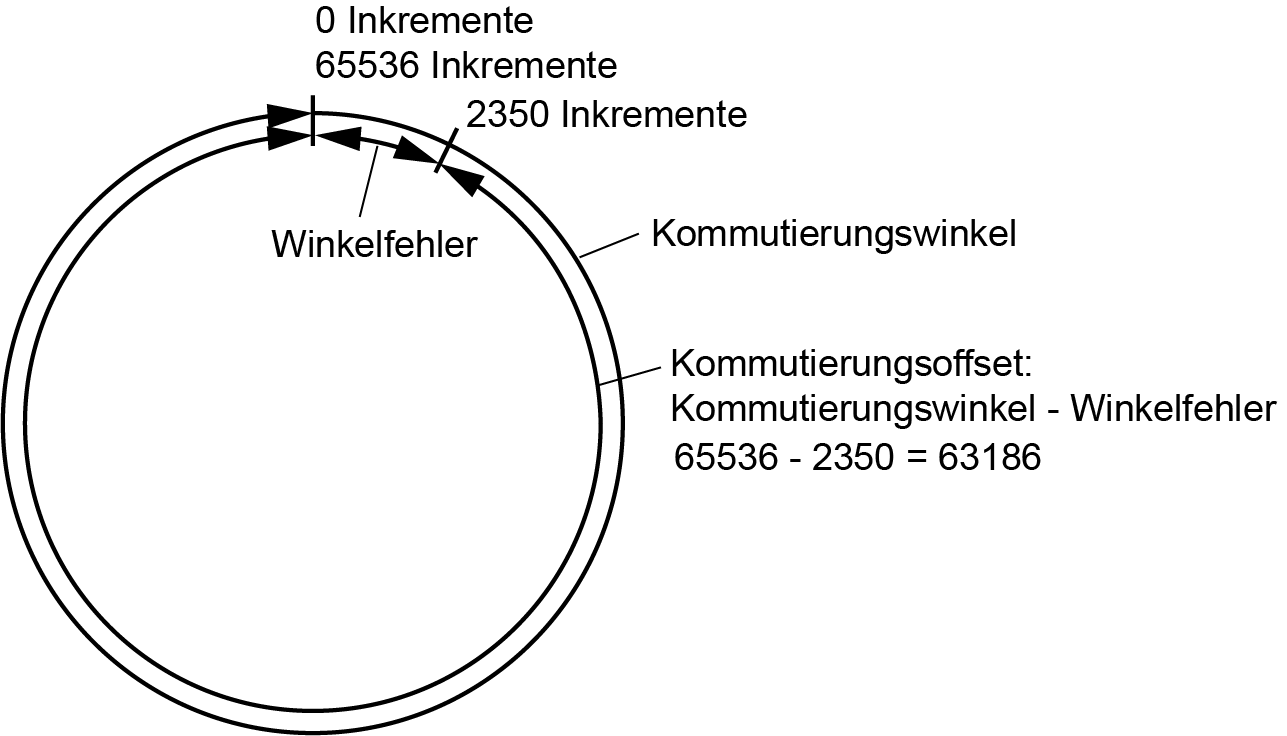
Der elektrisch ausgerichtete Synchronmotor zeigt z.B. einen Kommutierungswinkel von
|
Kommutierungsoffset |
= Kommutierungswinkel - Winkelfehler |
|
= 65536 Inkremente - 2350 Inkremente |
|
|
= 63186 Inkremente |
Probe:
|
Kommutierungswinkel |
= Kommutierungsoffset + Winkelfehler |
|
= 63186 Inkremente + 2350 Inkremente |
|
|
= 65536 Inkremente → Entspricht dem Modulowert 0 |
Eigenschaften
|
Zugriff |
Lesen/Schreiben |
|
PDO Mapping |
Nein |
|
Wertebereich |
UNSIGNED16 |
|
Skalierung |
1 |
|
Einheit |
Inkremente |
|
Standardwert |
0 |
|
Min.-Wert |
0 |
|
Max.-Wert |
65535 |
