Funktionsblock SimKW
Darstellung des Funktionsblocks in MATLAB/Simulink
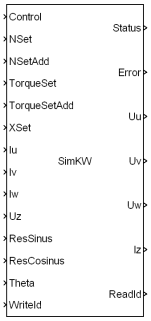
Der Funktionsblock SimKW bildet das Verhalten eines Kompaktwechselrichters mit der Reglerkarte nach. Das schließt die Regelungssoftware und die IGBT-Brücke zur Ausgabe der Phasenspannungen ein. Dabei wurden die Original-Softwarequelltexte mit einbezogen, wie sie auch im Regler selbst verwendet werden.
Als Eingangsgrößen werden Steuerwort, Spannungsversorgung, Sollwerte und die Istwerte vom Motor an SimKW übergeben.
Ausgangsgrößen sind die Phasenspannungen sowie Statusinformationen, konfigurierbare Oszilloskopdaten und der Zwischenkreisstrom.
Im Vergleich zum realen Gerät wurden verschiedene Vereinfachungen vorgenommen:
- Die folgenden Funktionalitäten sind nicht Bestandteil der Regler-Simulation:
- Feldbusanbindung
- Analogeingänge
- Binäre Ein- und Ausgänge
- Sollwerte werden direkt als Gleitkommawerte eingegeben
- Steuerkommandos werden als Bits im Steuerwort am Eingang vorgegeben
- Phasenspannungen:
Es wird nicht die tatsächliche, durch die PWM geschaltete Spannung, sondern ein Mittelwert über jede PWM-Periode ausgegeben. Andernfalls müsste die Abtastzeit kleiner gewählt werden, was den Rechenzeitbedarf unnötig erhöhte.
Sind Effekte im Zusammenhang mit der Sollwertvorgabe über ein Bussystem für das Simulationsergebnis wichtig, müssen diese Randbedingungen extern modelliert werden.
Die Antriebsparameter werden direkt aus einem AIPEX PRO-Projekt exportiert und vom Funktionsblock SimKW eingelesen. Damit kann ein Parametersatz aus einem realen Antrieb sehr schnell für die Simulation benutzt werden. Umgekehrt kann ein in der Simulation ermittelter Parametersatz in einen Antrieb eingespielt werden.
Der Block kann mehrfach in einem Simulink-Modell verwendet werden
