TwinCAT 3 Projekt mit NC Achse
Das Beispiel beschreibt wie ein Projekt mit TwinCAT NC Achse generiert wird.
Die Antriebe werden über die 'Online' Funktion der NC Achse gesteuert.
Starten Sie TwinCAT XAE (VS 2013)
![]()
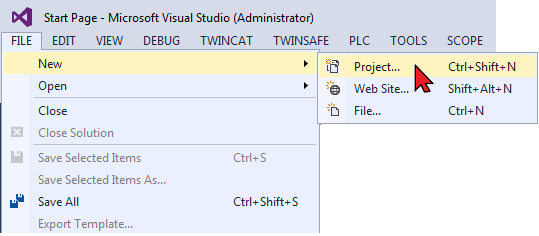
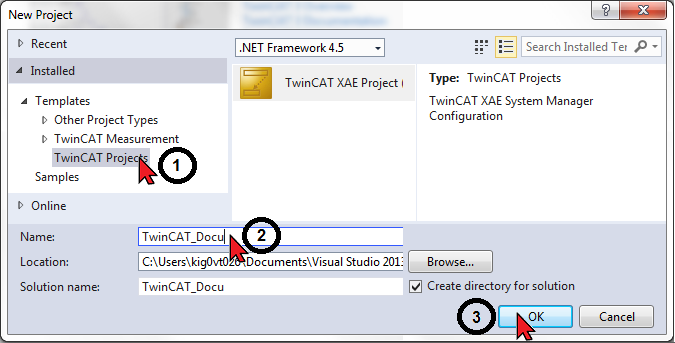
Erstellen Sie ein neues Projekt
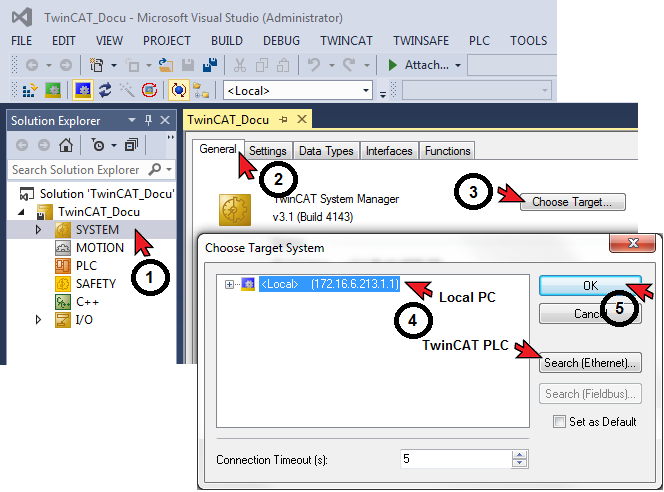
Wählen Sie das Zielsystem aus:
- Lokal (eigener PC)
- TwinCAT PLC
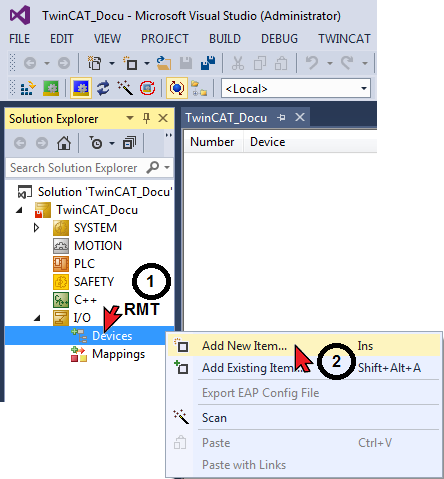
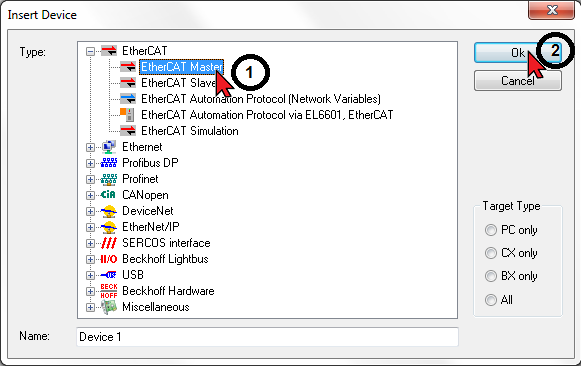
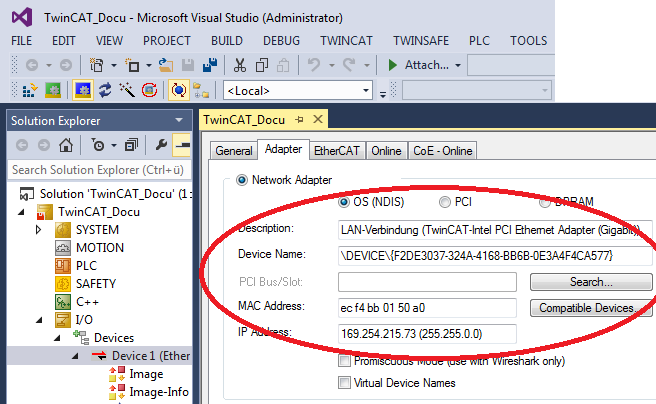
Fügen Sie die EtherCAT Master Funktionalität an das 'Device' Icon an
Vorhandenen Netzwerkadapter aktivieren
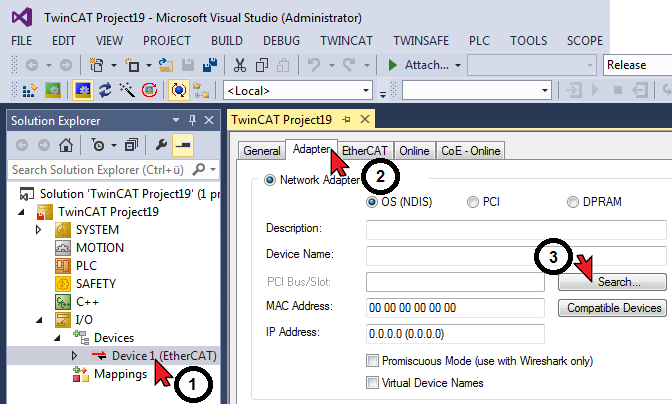
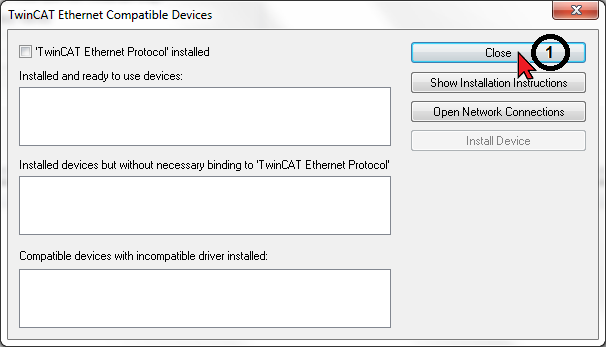
Treiber Installiert
Aktivieren Sie den Adapter
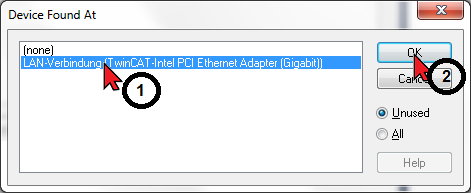
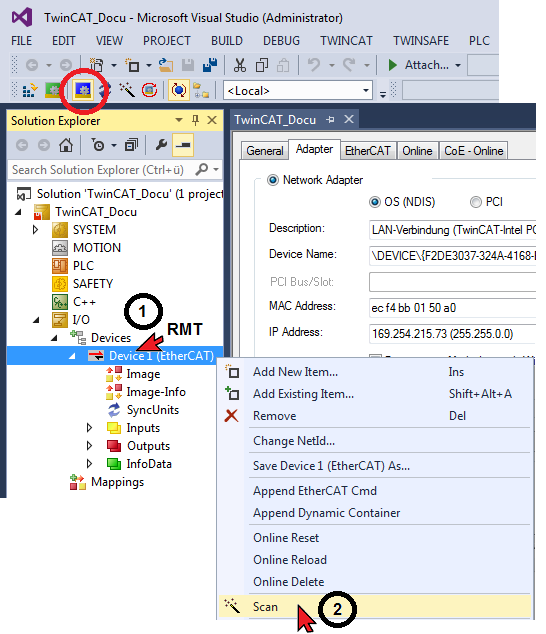
Netzwerk scannen
|
|
Das Scannen mit ist nur mit aktiviertem Netzwerkadapter möglich. |

|
|
Das Scannen ist nur im TwinCAT 'Config Mode' möglich. |
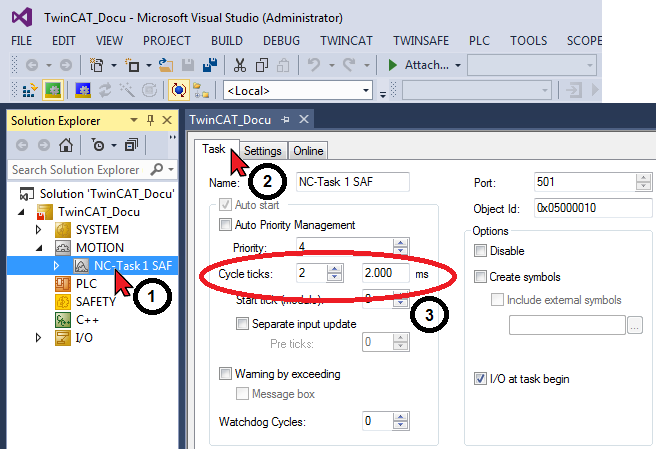
Zykluszeit TwinCAT/AMK
Folgende Zykluszeiten müssen identisch eingestellt sein.
|
TwinCAT |
|
AMK |
|---|---|---|
|
NC-Task 1 SAF |
= |
ID1 'NC-Zykluszeit' ID2 'SERCOS-Zykluszeit' |
|
|
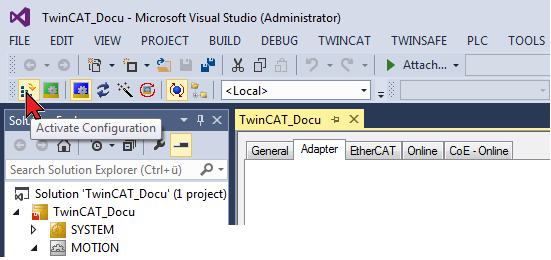
Beim Ausführen der TwinCAT Funktion 'Activate Configuration' wird automatisch der Wert aus der NC-Task 1 SAF in den AMK Antrieb übertragen.
Die Zykluszeiten werden bei der nächsten Initialisierung im AMK Antrieb aktiv. (Kommando Systemreset oder 24 VDC AUS/EIN)
Bei unterschiedlichen Werten generiert TwinCAT den Status Code '0x0037 - invalid SYNC1 cycle time' und AMK die Diagnosemeldung 2572, Info 27 |
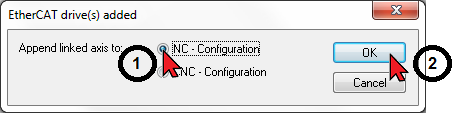
Konfiguration erstellen und Einloggen
Funktionstest 'Allgemein'
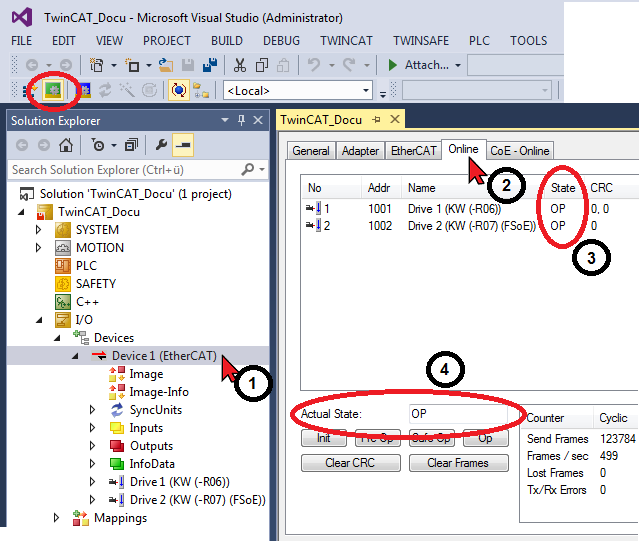
Im TwinCAT 'Run Mode' werden die Slave Geräte automatisch in den Bus State OP (Operational) versetzt (3). Für einen fehlerfreien Betrieb muss sich der EtherCAT Master im State OP (4) befinden.
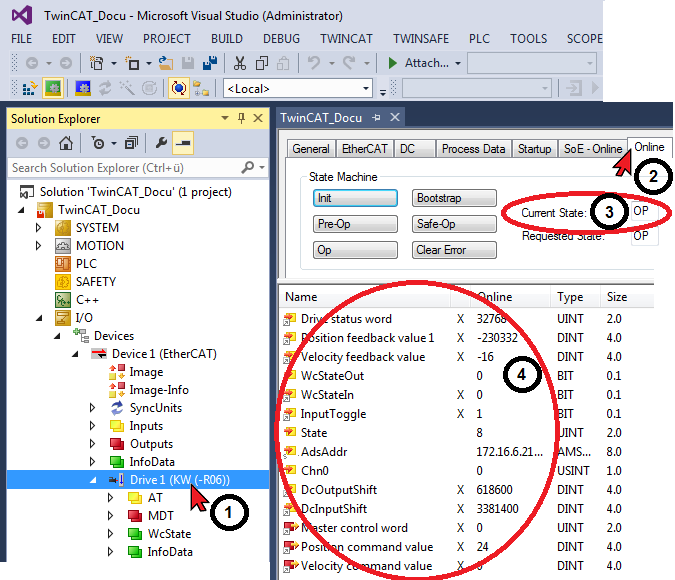
Funktionstest 'Antrieb'
Anzeige des Busstatus (3) und die aktuellen Werte der verbundenen Variablen.