ID82 'Positive torque limit'
|
Supported hardware: |
KW-R06 / KW-R16 / KW-R07 / KW-R17 / iX / iC / iDT5 /
|
||
|---|---|---|---|
|
Sphere of action: |
DRIVE |
Default value: |
1200 |
|
Access: |
READING / WRITING |
Scale: |
0.1 |
|
Temporarily changeable: |
YES |
Unit: |
%MN |
|
Data length: |
2 byte |
Min. value: |
-3000 %MN |
|
Signed: |
YES |
Max. value: |
3000 %MN |
|
Format: |
DEC |
||
|
List: |
NO |
||
The 'Positive torque limit' limits the maximum torque in the positive direction. It must be possible for the drive to realise the entered values.
The following applies for calculating the maximum possible limits:
Legend:
|
|
|
||
|
|
'Converter peak current' |
||
|
|
'Motor nominal current IN'
|
||
|
|
'Magnetising current' |
||
|
|||

If the specified torque setpoint requires a higher torque than the torque limit permits, the real-time bit
Siehe ID13 'Status class 3-messages'.
|
|
If ID92 'Bipolar torque limit' is configured, this takes priority over ID82 'Positive torque limit' and ID83 'Negative torque limit'. |
Actual values can not be determined with any accuracy, because of measurement and component tolerances. That means for the control loop, that the real acting limit, actual or setpoint values can differ up to 3 % of the rated torque (proportional to
Meaning for KW-R06 / KW-R16 / KW-R07 / KW-R17 /
|
|
If 'torque limiting via analogue input A2' is selected in ID32800 'AMK main operating mode'0x2221/1'AMK main operation mode' , the larger limit value from ID82 and ID83 limits the maximum torque if 10 V DC are present at the analogue input A2. The analogue input voltage at A2 is evaluated quantitatively. Example: ID82 = 100 % ID83 = 120 % (10 V DC at A2 correspond to a torque limit of 120 % MN (ID32771 'Nominal torque' x 1.2)). |
Examples of torque setpoint limits (ID82, ID83)
| Parameterization | Active operation mode | Drive behavior | |||
|---|---|---|---|---|---|
|
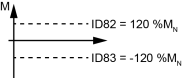
Bipolar limits, e.g. +/- 120 %MN
|
Position control or speed control |
Position control or speed control with torque within the parameterized limits |
|||
|
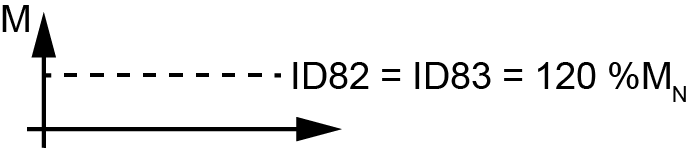
Equal limits, e.g. +120 %MN
|
Position control or speed control | Torque control (current control) to the parameterized torque setpoint limit, e.g. +120 %MN
If the torque limits do not allow torque in both directions of rotation, the motor will apply a constant torque regardless of the setpoint according to the set limit. Without load, the motor will accelerate at the current limit with 120% MN until the turn-off speed n > 1.25 x ID113 is reached and coasts with error message.
The drive can only control if the limits allow torques in the positive and negative directions of rotation (bipolar torque limits). |
|||
|
Equal limits, e.g. -120 %MN 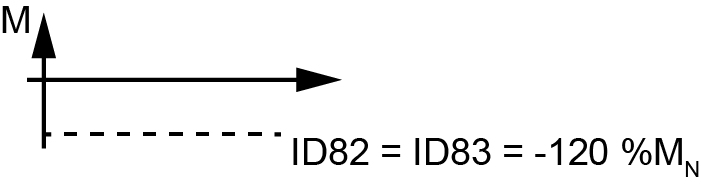
|
Position control or speed control |
Torque control (current control) to the parameterized torque setpoint limit, e.g. -120 %MN
If the torque limits do not allow torque in both directions of rotation, the motor will apply a constant torque regardless of the setpoint according to the set limit. Without load, the motor will accelerate at the current limit with -120% MN until the turn-off speed n > 1.25 x ID113 is reached and coasts with error message.
The drive can only control if the limits allow torques in the positive and negative directions of rotation (bipolar torque limits). |
|||
|
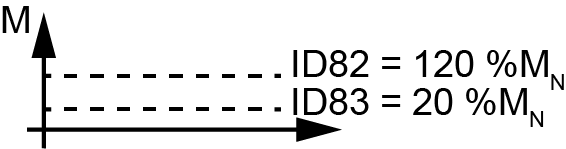
Unequal limits, both positive, e.g. +20 bis +120 %MN
|
Position control or speed control |
Position control or speed control with torque within the parameterized limits, e.g. +20 %MN bis +120 %MN
|
|||
|
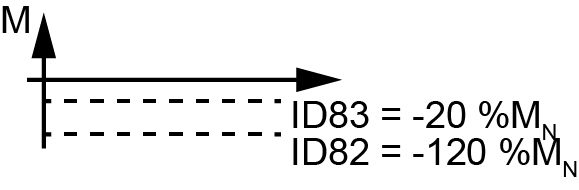
Unequal limits, both negative, e.g. -20 bis -120 %MN 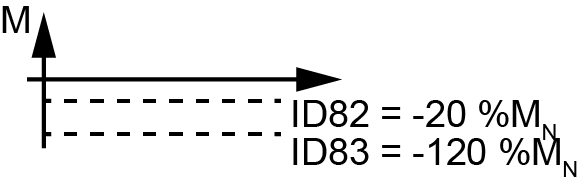
|
Position control or speed control | Position control or speed control with torque within the parameterized limits, e.g. -20 %MN to -120 %MN
|
|||
|
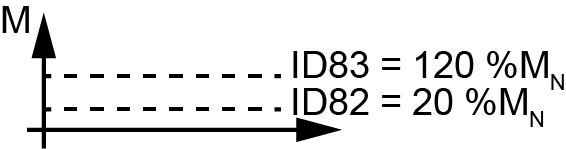
Invalid parameterization! ID83 > ID82
|
Position control |
The controller enable (RF) will be withdrawl and the diagnosis message error 1313 'ID82 less then ID83' is generated. |
|||
|
Invalid parameterization! ID83 > ID82
|
Position control |
The controller enable (RF) will be withdrawl and the diagnosis message error 1313 'ID82 less then ID83' is generated. |