FOLLOW_AXIS_CRANK_DRIVE_EMULATION (FB)
The function block 'FOLLOW_AXIS_CRANK_DRIVE_EMULATION' emulates a crank gearing drive.
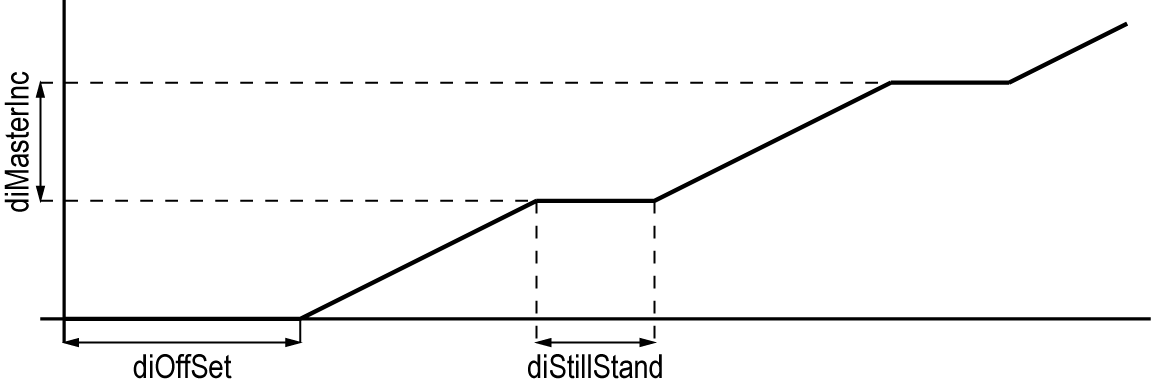
The function block provides a way-way-function with standstill area. It can be used for example in film transport and cut with stationary blade.
- The curve starts always at the end of the standstill area.
- By parameterisation, different junctions can be selected:
- 45° curve
- Sinus curve
- Sinus² curve
By means of an offset at the start of the movement, the curve can be synchronised to an external starting point.
The function block is called in the asynchronous program level PLC_PRG.
Setpoints and current values are transferred in a synchronous action. The synchronous action must be called in the synchronous program level FPLC_PRG.
|
FOLLOW_AXIS_CRANK_DRIVE_EMULATION |
|||||
|
FB enable |
- |
boEnable |
boEnabAck |
- |
Ackn. "FB enable" |
|
Start crank drive |
- |
boControl |
boCamEnabAck |
- |
Ackn. crank drive active |
|
Input value |
- |
diInVal |
boInAck |
- |
End of engage table |
|
calculation mode |
- |
enShape |
boOpAck |
- |
End of work table |
|
boOutAck |
- |
End of disengage table |
|||
|
boErr |
- |
Error | |||
|
|
|
iErrID |
- |
Error ID |
|
|
|
actSync |
||||
|
Start offset |
- |
diOffSet |
diOutVal |
- |
Output value |
|
standstill range |
- |
diStillStand |
|
|
|
|
increments per rotation |
- |
diMasterInc |
|
|
|
|
Name |
Type |
Description |
||||||
|---|---|---|---|---|---|---|---|---|
| boEnable |
BOOL |
Enable signal: With a positive edge, the initialisation of the block starts. As long as 'boEnable' = TRUE, the block remains enabled and is processed by the PLC. In the state 'boEnable' = FALSE the block is no longer enabled and is thus no longer processed. |
||||||
|
boControl |
BOOL |
Start / Stop of the crank drive function | ||||||
|
diInVal |
DINT |
Input value pulses [increments] | ||||||
|
enShape |
ENUM |
EN_CRANK_DRIVE_SHAPE Shape of crank drive curve
|
|
Name |
Type |
Description |
|---|---|---|
| diOffSet |
DINT |
Offset at the start of the first revolution. [Inkr] The offset moves the movement function to the back. |
| diStillStand |
DINT |
Stability range at the end of the revolutions [incr] |
| diMasterInc |
DINT |
Number of increments per revolution (without start - offset) [incr.] |
|
Name |
Type |
Description |
|||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| boEnabAck |
BOOL |
Acknowledgement: Function block is initialised and enabled |
|||||||||||||||||||
| boCamEnabAck |
BOOL |
Acknowledgement: Cranc drive active |
|||||||||||||||||||
| boInAck |
BOOL |
Acknowledge end of phasing in table Pulse at end of phasing in table; 'boInAck' = TRUE for 2 sampling time points |
|||||||||||||||||||
| boOpAck |
BOOL |
Acknowledge end of operating table Pulse at end of operating table; 'boOpAck' = TRUE for 2 sampling time points |
|||||||||||||||||||
| boOutAck |
BOOL |
Acknowledge end of phasing out table Pulse at end of phasing out table; 'boOutAck' = TRUE for 2 sampling time points |
|||||||||||||||||||
| boErr |
BOOL |
The function block is in an error state
|
|||||||||||||||||||
| iErrID |
INT |
Error identity number: Diagnostic number is output
|
|||||||||||||||||||
|
Name |
Type |
Description |
|---|---|---|
| diOutVal |
DINT |
Output value - impuls [Incr] (can, for example, be issued with 'SET_VAL_I' to the drive) |
| PLC_PRG (asynchronous part of the programm) | FPLC_PRG (synchronous part of the programm) |
|---|---|
| FOLLOW_AXIS_CRANK_DRIVE_EMULATION | FOLLOW_AXIS_CRANK_DRIVE_EMULATION.actSync |
|
|
Associated with this function block, a visualisation is prepared in CoDeSys. |

