Torque limitation
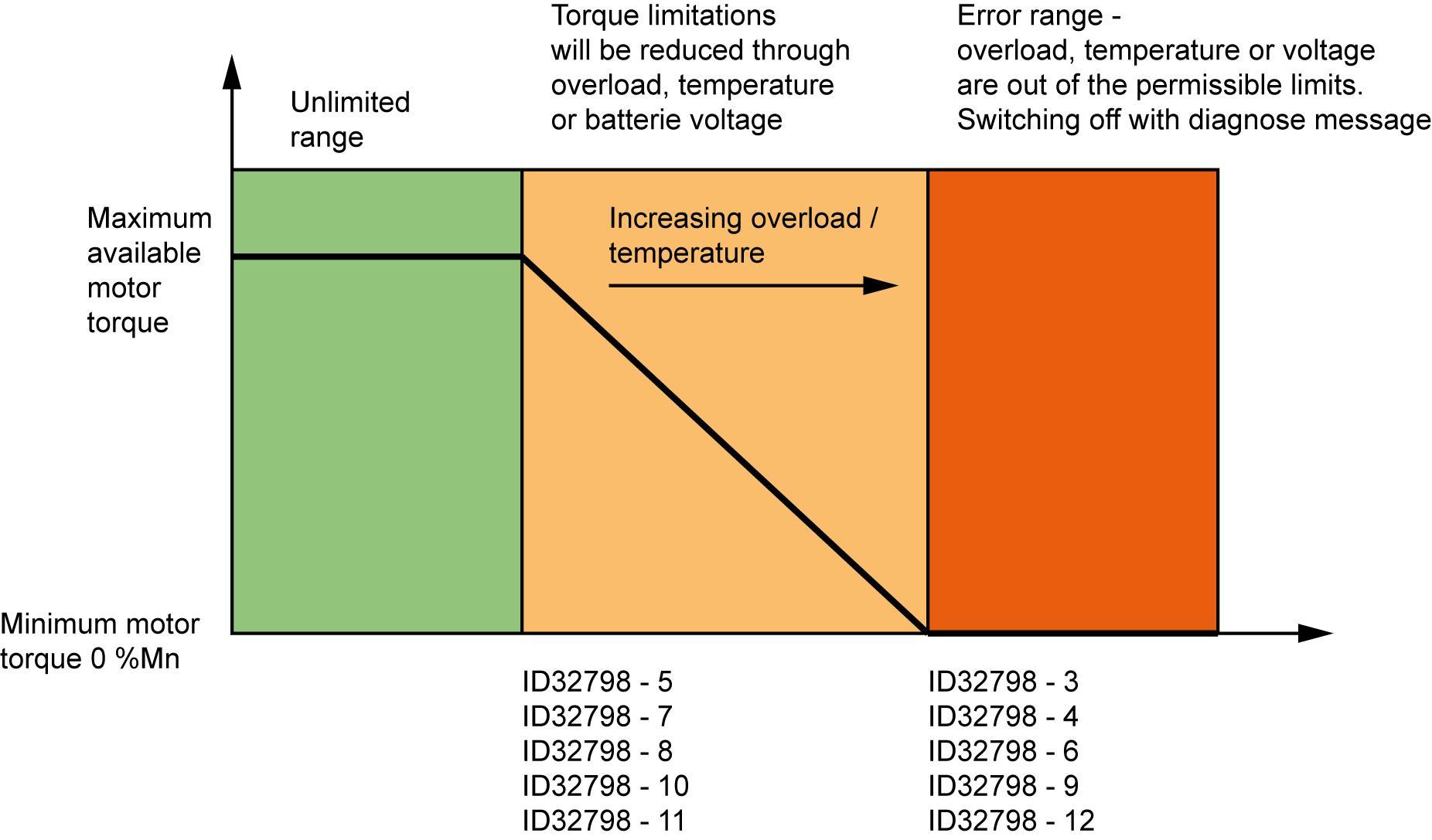
Operating the motor with torque levels above the nominal torque is permitted within clearly defined limits. If the limits are exceeded, the drive generates a diagnostic message. The power output stage is switched off and the motor coasts down.
To enable the inverter to be operated in a fault-free manner, even at maximum load, the maximum motor torque is reduced automatically.
Derating is based on the following measured variables:
- Motor temperature
- Inverter power supply (IGBT) temperature
- Inverter cold plate temperature
- Overload as per inverter current integral
- Overload as per motor current integral
- Undervoltage or overvoltage in the HV circuit
Derating calculates a limit for the torque current. To ensure that this limit is not exceeded, the torque limits are influenced. Only the positive or negative torque limit that is currently active during operation is influenced.
No error messages are issued when the voltage limits are exceeded. However, torque cannot be taken from the motor that would cause the limits to be exceeded further.
If power is being reduced, this is signaled via X140 BO3 and via the CAN bus with CAN variable 'AMK_bDerating' .
Configuring torque limitation:
|
Temperature Motor |
Temperature measured by KTY in the motor winding, connected to terminal X12 at the inverter |
||||||||
|
ID32798 'User list 1'
|
|||||||||
|
Temperature Inverter power supply (IGBT) |
Temperature measured (IGBT) by temperature model |
||||||||
|
ID32798 'User list 1'
|
|||||||||
|
Temperature Inverter cold plate |
Temperature measured by KTY on cold plate | ||||||||
|
ID32798 'User list 1'
|
|||||||||
|
Overload as per inverter current integral |
Always active, cannot be deactivated |
||||||||
|
ID32999 'Overload limit inverter' Threshold of the inverter current integral from which derating starts and a message is issued |
|||||||||
|
Overload as per motor current integral 1) |
Activate the I²t monitoring of the servo motor in ID32773 'Service bits', bit 14 |
||||||||
| ID114 'Overload limit motor' Threshold of the motor current integral from which derating starts and a message is issued. |
|||||||||
|
Relevant motor parameters ID109 'Motor peak current' ID34096 'Standstill current motor' ID34168 'Time maximum current motor' |
|||||||||
|
Undervoltage or overvoltage in the HV circuit |
ID32798 'User list 1'
|
|
|
Configuration information: See 'FSE parameters'. |

