ID34243 'Offset commutation'
|
Sphere of action: |
DRIVE |
Default value: |
0 |
|
Access: |
READING / WRITING |
Scale: |
0 |
|
Temporarily changeable: |
YES |
Unit: |
Increments |
|
Data length: |
2 byte |
Min. value: |
0 |
|
Signed: |
NO |
Max. value: |
65535 |
|
Format: |
DEC |
||
|
List: |
NO |
|
|
|
|---|---|
|
|
Risk of injury from uncontrolled movements of the motor shaft If the offset is entered incorrectly, the motor is not controllable and can carry out uncontrolled movements as soon as the controller enable is set! With 'Initial program loading' the offset is reset to the default value of 0. A previously determined commutation offset is lost. There is no remanent storage in the encoder. Steps to prevent:
|


The
The 'Offset commutation' is added to the actual commutation angle of the encoder.
If the motor negation bit
Only positive values in the range 0 - 65535 [increments] can be specified as 'Offset commutation'.
The value 65535 corresponds to a displacement by one mechanical revolution of the motor (360°).
Areas of application:
Foreign motors where the determination of the commutation angle deviates from the method by AMK.
Advantage:
With 'Offset commutation', the commutation angle of the foreign motor can be adapted to the AMK inverter, without changing the manufacturer-specific value in the encoder.
The 'Offset commutation' works for the following encoder types EnDat and Hiperface (AMK designations E, F, S, T, P, Q, U, V).
Another area of application is the 'fine tuning' of the commutation angle. An existing deviation from the optimum commutation angle can be compensated by small offset values.
Example: Calculation of the commutation angle from offset commutation and the encoder position
|
Example |
|
Value |
|---|---|---|
|
1 |
|
0 0 [Increments] 451 [Increments] |
|
2 |
|
0 13000 [Increments] 13451 [Increments] |
|
3 |
|
1 0 [Increments] 65085 [Increments] |
|
4 |
|
1 13000 [Increments] 52085 [Increments] |
Example: Compensate errors in the commutation angle
Mechanical motor revolution (360°)
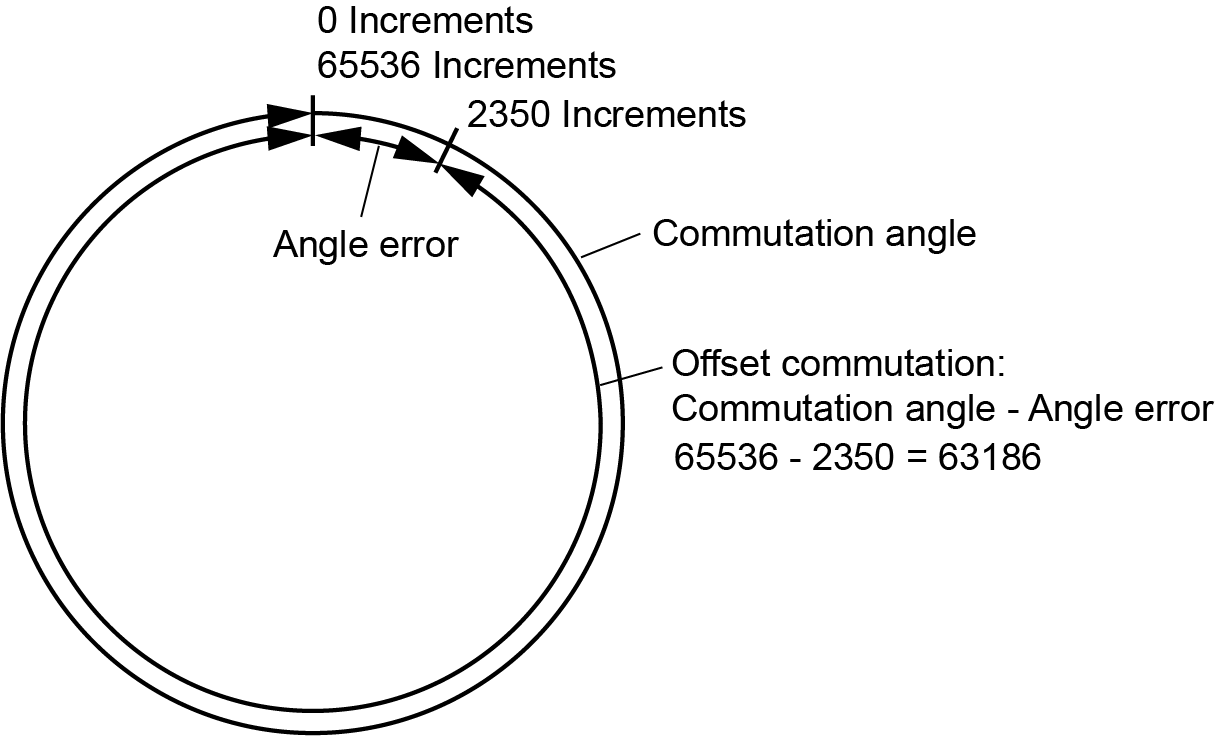
The electrically-aligned synchronous motor shows e.g. a commutation angle of
|
Offset commutation |
= Commutation angle - Angle error |
|
= 65536 Increments - 2350 Increments |
|
|
= 63186 Increments |
Check:
|
Commutation angle |
= Commutation offset + Commutation error |
|
= 63186 Increments + 2350 Increments |
|
|
= 65536 Increments → Correspond the modulo value 0 |
