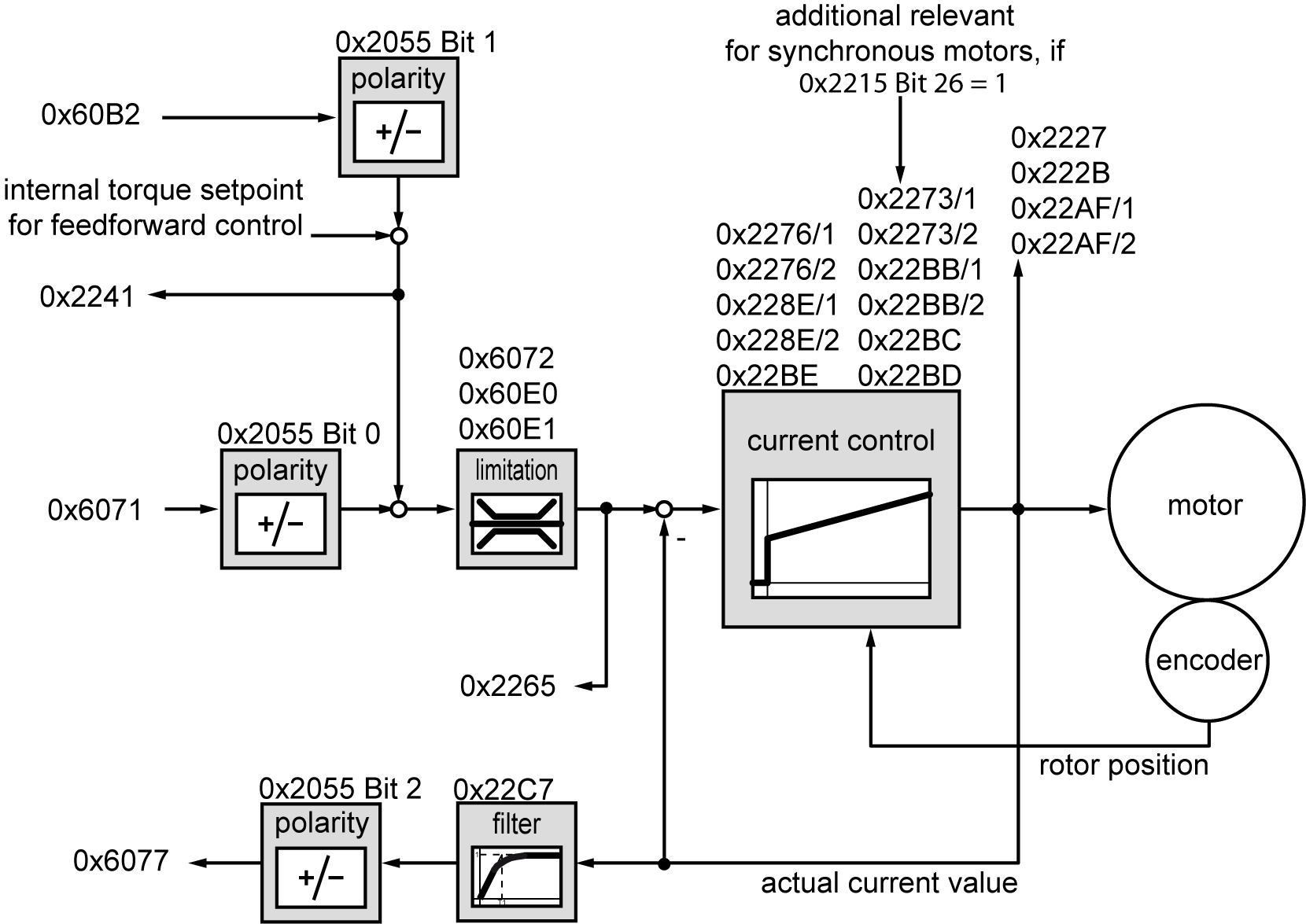
Torque and current control
| Object | Name |
|---|---|
|
0x6071 |
'Target torque' |
|
0x60B2 |
'Torque offset' |
|
0x60E0 |
'Positive torque limit value' |
|
0x60E1 |
'Negative torque limit value' |
|
0x6077 |
'Torque actual value' |
|
0x2055 |
'Torque polarity' |
|
0x2056 |
'Torque data scaling' |
|
0x2215 |
'Service bits' |
|
0x2221/8 |
'AMK digital torque control' |
|
0x2227 |
'Magnetising current feedback' |
|
0x222B |
'Torque current feedback' |
|
0x2241 |
'Sum of additive torques' |
|
0x2265 |
'Torque setpoint at controller' |
|
0x2273/1 |
'Inductance path D' |
|
0x2273/2 |
'Inductance path Q' |
|
0x2276/1 |
'Current path Q integral-action time' |
|
0x2276/2 |
'Current path D integral-action time' |
|
0x228E/1 |
'Current path Q proportional gain' |
|
0x228E/2 |
'Current path D proportional gain' |
|
0x22AF/1 |
'Voltage path Q' |
|
0x22AF/2 |
'Voltage path D' |
|
0x22BB/1 |
'Feed forward control voltage path Q' |
|
0x22BB/2 |
'Feed forward control voltage path D' |
|
0x22BC |
'Phase resistance' |
|
0x22BD |
'Voltage constant Ke' |
|
0x22BE |
'Increase motor voltage' |
|
0x6072 |
'Maximal torque' |
|
0x22C7 |
'Torque feedback filter' |
