Parameter file
| Name | Design | Description |
|---|---|---|
| Parameter file | STRING | Name of the file with motor parameters |
The properties of the motor are defined in the parameter file.
Severals motors
The file is edited manually in any text editor and must be saved in the simulation path.
The file name is entered at the block SimMotor as '>Parameterdatei<.txt' .
The precision of the simulation results depends heavily on the quality of these motor parameters.
Parameter file 'Motoren.txt'
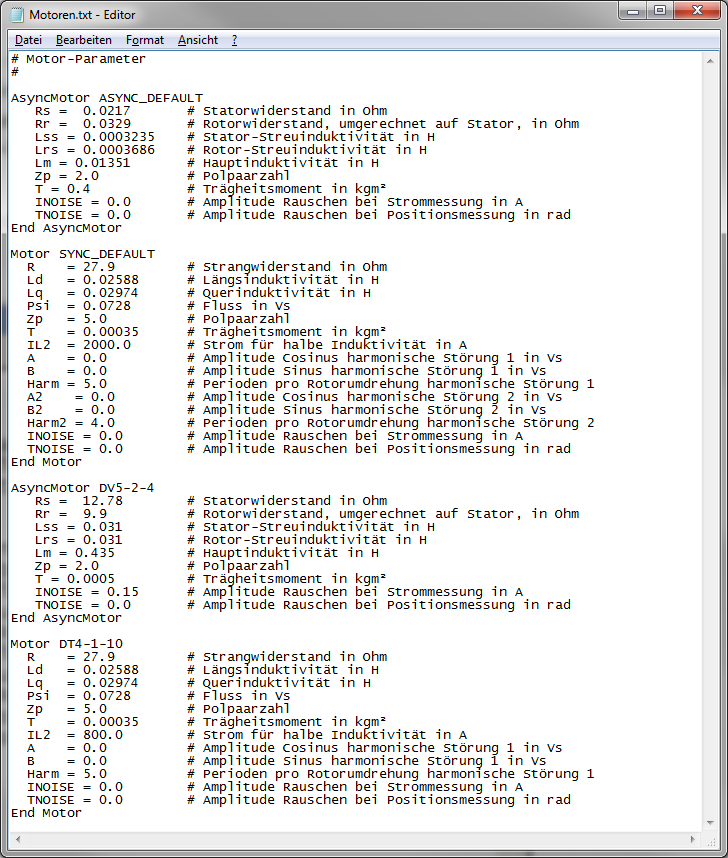
The required parameters differ for asynchronous and synchronous motors.
Parameters for asynchronous motors
The definition of an asynchronous motor begins with the keyword AsyncMotor.
| Name | Design | Unit | Description |
|---|---|---|---|
| Rs | DOUBLE | Ω | Stator resistance Rs |
| Rr | DOUBLE | Ω | Rotor resistance Rr |
|
Lss |
DOUBLE |
H |
Stator leakage inductance Lss |
|
Lrs |
DOUBLE |
H |
Rotor leakage inductance Lrs |
|
Lm |
DOUBLE |
H |
Main inductance Lm |
| Zp | DOUBLE | Pole pair number | |
| T | DOUBLE | kgm2 | Rotor moment of inertia |
| INOISE | DOUBLE | A | Noise amplitude during current measurement |
| TNOISE | DOUBLE | rad | Noise amplitude during position measurement |
Parameters for synchronous motors
The definition of a synchronous motor begins with the keyword Motor.
| Name | Design | Unit | Description |
|---|---|---|---|
| R | DOUBLE | Ω | Resistance of the motor phase Rs |
| Ld | DOUBLE | H | d-axis inductance of one motor phase Ld |
| Lq | DOUBLE | H | q-axis inductance of one motor phase Lq |
| Psi | DOUBLE | Vs |
Rotor flux
|
| Zp | DOUBLE | Pole pair number | |
| T | DOUBLE | kgm2 | Rotor moment of inertia |
| IL2 | DOUBLE | A |
Current at which inductance is halved (This parameter is used to describe saturation effects. If saturation is not to be taken into account, a value significantly higher than the nominal current must be entered.) |
| A / A2 | DOUBLE | Vs | Harmonic distortion 1 / 2: amplitude of the cosine proportion |
| B / B2 | DOUBLE | Vs | Harmonic distortion 1 / 2: amplitude of the sine proportion |
| Harm / Harm2 | DOUBLE | Harmonic distortion 1 / 2: periods per rotor revolution (for simulation of cyclic distortions, z. B. cogging, gearing imbalance) | |
| INOISE | DOUBLE | A | Noise amplitude during current measurement |
| TNOISE | DOUBLE | rad | Noise amplitude during position measurement |
If one of the parameters is not defined, it is assigned a default value.
