Startup the NC axis
The NC axis operates in position control mode, independently of the operating mode (speed or position control) set for the drive.
If the rotational speed control mode is active in the drive, the position control loop in the NC axis is automatically closed.
The nominal value specified by the NC axis depends on the operating mode set in the drive and is adapted automatically.
Non-adapted control parameters quickly generate a lag distance error, since this is monitored by the NC axis as standard.
|
|
Requirement: The direct-current link is charged Acknowledgment DC converter ON (QUE) = 1 |

AMK position control mode
|
|
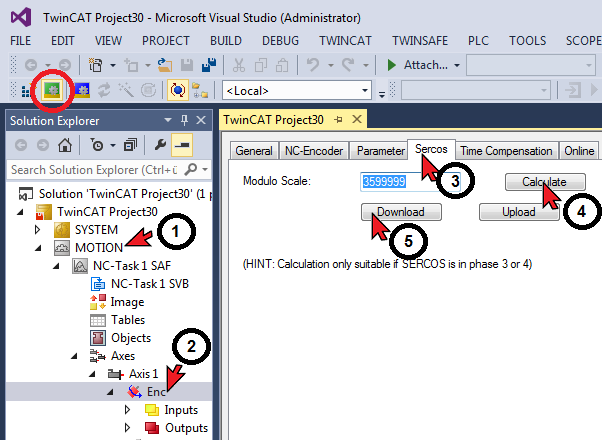
To operate the NC axis, the encoder overflow value for modulo operation must be calculated and transmitted.
An incorrect value leads to AMK diagnostic message 2318 'Control deviation' during operation. |
TwinCAT ‘Run Mode’ is required (there is no confirmation after 'Download')
AMK drive:
|
|
NC axis lag distance (error code 0x4550)
Set ID104 'Position loop factor KV' to a value adjusted to the application. Activate the SAK (lag distance compensation)
|
ID104 'Position loop factor KV'
ID32796 'Source RF': 5 (RF via field bus)
ID32800 'AMK main operating mode': 00410004 (cyclic nominal value input via EtherCAT, position control mode)
Alternatively:
ID32800 'AMK main operating mode': 00410204 (cyclic nominal value input via EtherCAT, position control mode, SAK active)
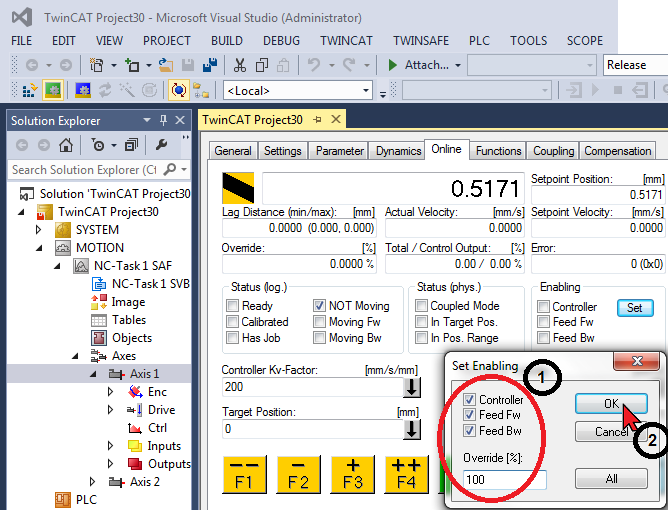
Energize motor (activate RF), enable direction of rotation and set Override.
AMK rotational speed control mode
The position control loop is closed by the control unit. The control unit determines the nominal rotational speeds.
AMK drive:
ID32796 'Source RF': 5 (RF via field bus)
ID32800 'AMK main operating mode': 00410003 (cyclic nominal value input via EtherCAT, rotational speed control mode)
TwinCAT NC:
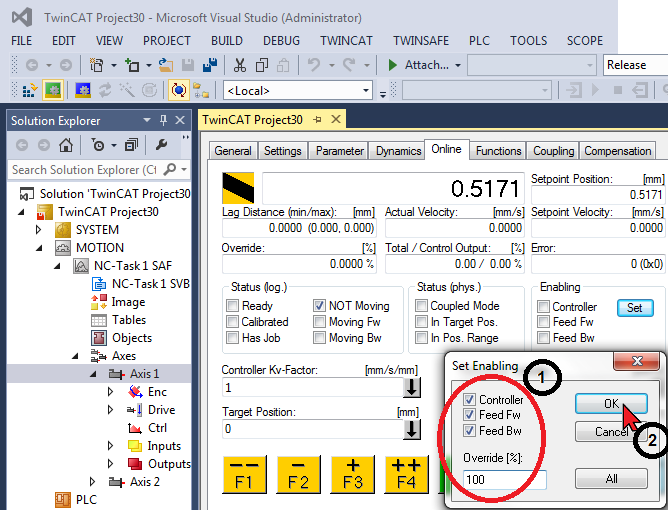
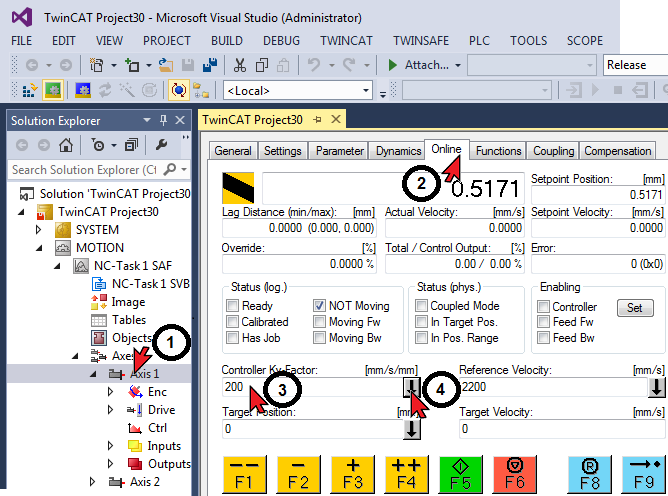
Set the ‘Controller Kv-Factor’ to a value adequate to the application.
Value too low: large lag distance, lag error
Value too high: drive oscillates
Energize motor (activate RF), enable direction of rotation and set Override.