3003 'Positioning (absolute) to fixed stop positive direction of rotation'
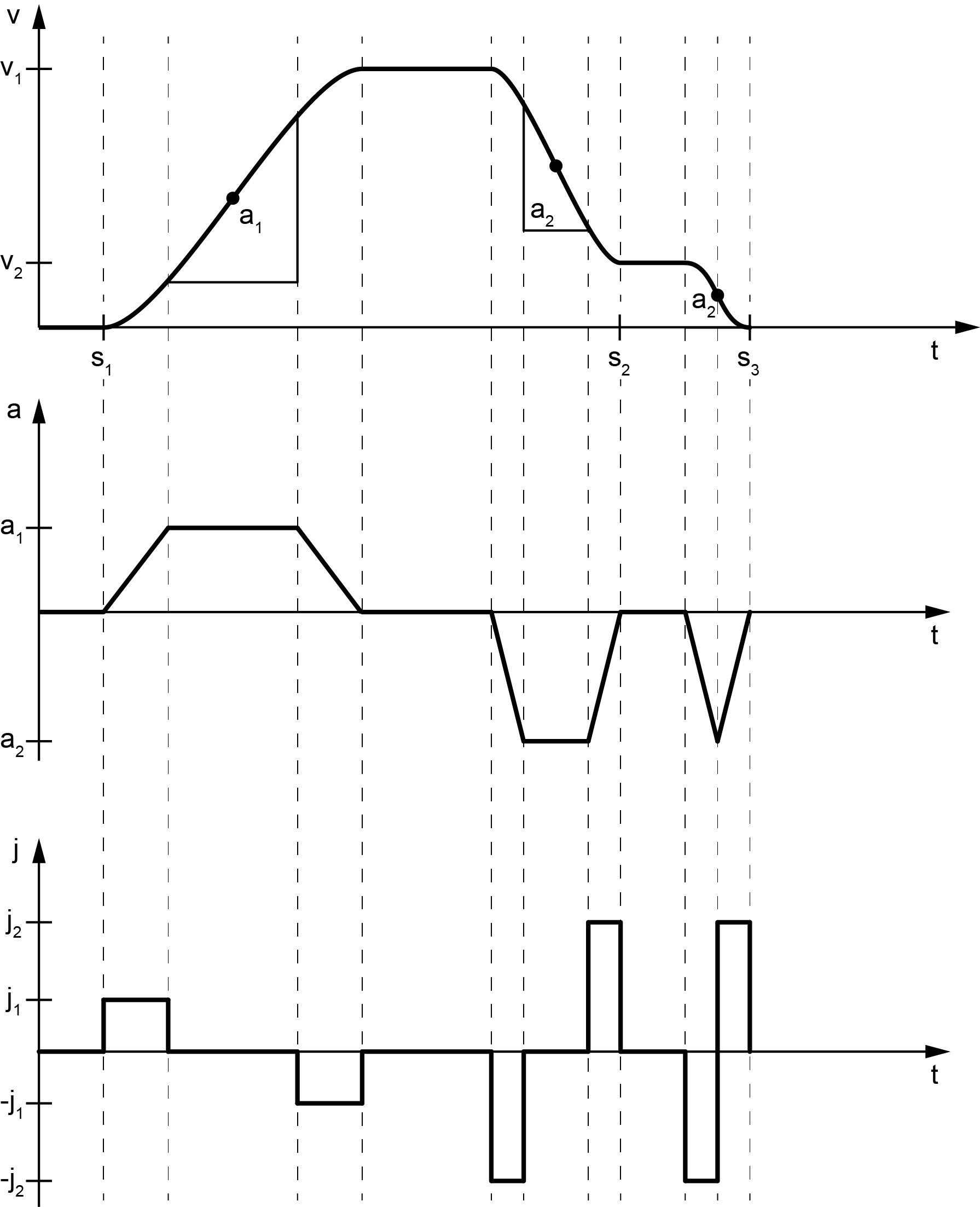
With the command ‘Positioning to fixed stop,’ the absolute position of the fixed stop and the positioning velocity are added to the command data. In absolute positioning, the position setpoint is based on the homing point. The homing point must be known (outDW0 Bit 4 = 1) before an absolute positioning is started. The application parameters for acceleration, deceleration and jerk are effective. Near the fixed stop, the fixed stop can be approached at reduced velocity. Before the switching position is reached, the drive adjusts the positioning velocity so that the switching velocity is reached at the switching position. Movement continues at switching velocity to the fixed stop. The switching position is defined relative to the absolute position of the fixed stop.
From the switching point onward, the current torque is monitored. The fixed stop is reached when the following conditions are met:
- The current torque has reached or exceeded the torque threshold Index 1009
- The actual position value of the drive no longer changes
- The drive has reached the position of the fixed stop and is located within the position window
When the fixed stop is reached, the torque is maintained for the ‘Time to fixed stop’, after which the command is terminated.
|
Control data to drive |
Status data from drive |
|||||
|---|---|---|---|---|---|---|
| Code | Command |
Data 1 |
Data 2 |
Acknowledgment of command | Data | |
| 3003 | 'Positioning (absolute) to fixed stop positive direction of rotation' |
Position setpoint (position of fixed stop) |
Speed setpoint |
3003 | xx | |
| Index | ||
|
s1 |
Start position |
|
|
s2 |
'Switching position (positioning to fixed stop)'
|
1011 |
|
s3 |
Expected position of the fixed stop
(Data 1) |
|
|
v1 |
Positioning velocity (Data 2) |
|
| v2 | 'Switching velocity (positioning to fixed stop)' | 1012 |
| a1 | ‘Acceleration’ |
1003 |
| a2 | ‘Deceleration’ | 1004 |
| j1 | ‘Acceleration jerk’ | 1005 |
| j2 | ‘Deceleration jerk’ | 1006 |
| 'Torque threshold (positioning to fixed stop)' | 1009 |
