Y-encoder
The following data are typical guidelines and can therefore deviate for the specific motor.
|
Encoder type |
Technical description |
Manufacturer / |
|---|
| Y |
|
Sick Stegmann singleturn: |
| Resolution: 17 / 20 / 23 bit/revolution | ||
|
Measuring principle: optical ( ) |
||
| Protocol: Hiperface DSL | ||
Output signal
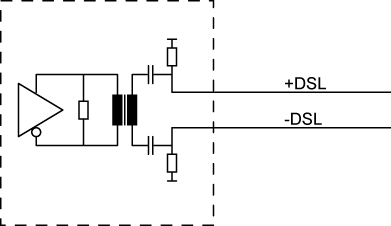
The Hiperface DSL protocol transmits digital data between an encoder and the drive controller by modulating the data into the supply line of the encoder. The absolute positions are send serial and cyclic synchronous from the encoder triggered by the trigger signal of the drive controller.
| Data |
Singleturn encoder |
Multiturn encoder |
|||||
|---|---|---|---|---|---|---|---|
|
EKS 36 |
EFS 50 |
EKM 36 |
EFM 50 |
||||
|
Voltage supply |
VDC |
9 ±15 % |
9 ±15 % |
9 ±15 % |
9 ±15 % |
||
|
Current consumption without load (8 V) |
mA |
60 |
60 |
60 |
60 |
||
|
Mechanically permitted speed |
1/min |
12000 |
12000 |
9000 |
9000 |
||
|
Absolute position values |
|||||||
|
Signal characteristic |
|
RS485 |
RS485 |
||||
|
Resolution |
Pos./U |
131072 |
1048576 |
8388608 |
131072 |
1048576 |
8388608 |
|
Rotations |
|
1 |
1 |
4096 |
4096 |
||
Output circuit, encoder